Цикл статей:
Глава 1 – Комплексирование средств защиты горочных стрелок от несанкционированного переводаГлава 2 – Исследование индуктивных шлейфов напольного датчика обнаружения подвижных единиц ипд
Глава 3 – Комплексирование напольных датчиков обнаружения подвижных единиц
Глава 4 – Экспериментальные исследования комплексированной защиты горочных стрелок
Введение
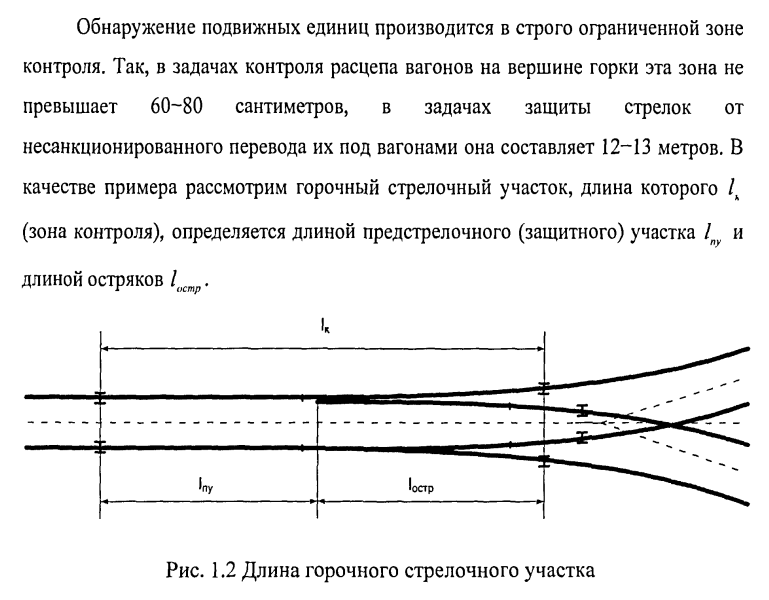
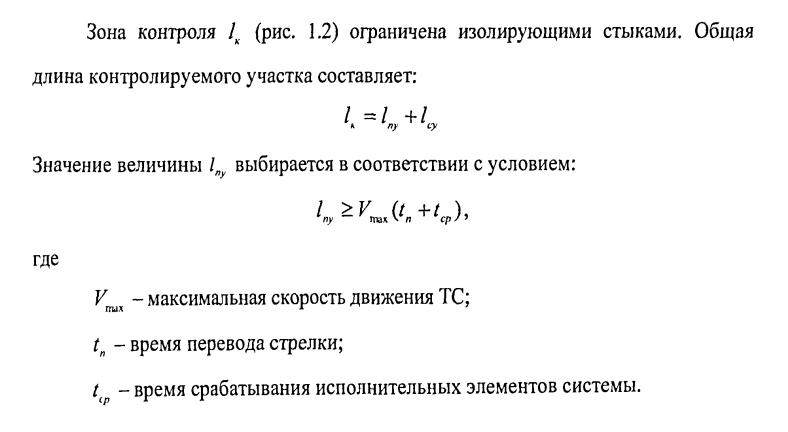
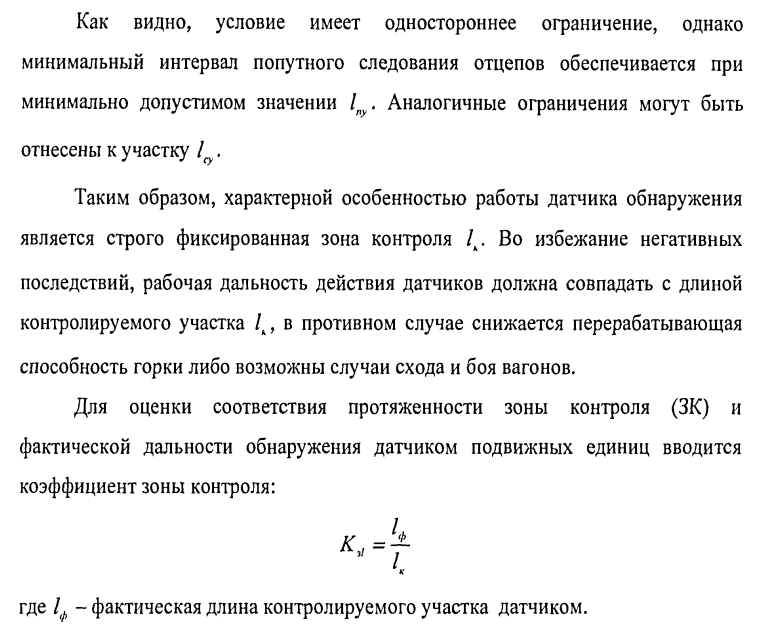
Задача повышения эффективности и качества работы железнодорожного транспорта решается на основе совершенствования организации эксплуатационной работы железных дорог и их технического перевооружения. Неотъемлемой частью перевозочного процесса на железнодорожном транспорте является технологическая работа, связанная с переработкой грузовых составов на специальных станциях, называемых сортировочными, показателем которых является суточная переработка вагонов.
Для выполнения сортировочной работы широко используются различные специальные комплексы и системы, среди которых основными являются сортировочные горки. Эффективность процессов расформирования и формирования составов в значительной степени определяется качеством работы сортировочных горок и технологическими возможностями. Основной задачей повышения перерабатывающей способности сортировочных горок является увеличение скорости роспуска вагонов при соблюдении требований безопасности.
На сети железных дорог Российской Федерации насчитывается 123 станции, имеющих 147 сортировочных горок. В соответствии с реорганизацией структуры управления перевозочным процессом сортировочные станции сети железных дорог России поделены на две категории: сетевые и региональные, утвержден и их перечень. Несмотря на относительно небольшое количество сортировочных станций на железных дорогах России, их значимость неуклонно возрастает. Об этом свидетельствует внимание ОАО «РЖД» к комплексной реконструкции сортировочных горок и станций.
Выполнить переход на качественно новый уровень переработки вагонов, позволяющий обеспечить выполнение перспективного плана формирования без коренного обновления и комплексной реконструкции средств автоматизации и механизации на сортировочных станциях и горках, невозможно ввиду несоответствия технической оснащенности объектов современным требованиям.
Значительный вклад в совершенствование горочных устройств и систем автоматизации и механизации, проектирования сортировочных горок внесли известные ученные и специалисты: П.В. Бартенев, A.M. Долаберидзе, C.B. Земблинов, С.П. Бузанов, П.М. Карпов, В.Е. Павлов, В.Д. Прокинова, Г.А. Красовский, А.Н. Шабельников, В.Д. Никитин, В.Д. Ратников, Н.О. Рогинский, Б.А. Родимов, И.И. Страковский, Л.Б. Тишков, Н.И. Федотов, Н.М. Фонарев, H.A. Никифоров, Ю.В. Ваванов, А.Н. Перов, B.C. Скабалланович, В.М. Дудниченко, А.Е. Штанке, Е.М. Шафит, Н.Р. Ющенко, А.А Яблонский, В.Н. Иванченко, В.П. Шейкин, В.И. Шелухин, В.А. Кобзев, А.Г. Савицкий, В.А. Парилов, А.П Дзилиев, Ю.Г. Боровков, И.Н. Перов, Н.К. Модин, В.Н. Соколов и другие.
В системах горочной автоматической централизации (ГАЦ) узловыми устройствами, обеспечивающие безопасность движения отцепов по спускной части сортировочной горки, являются стрелочные участки. В последнее время на сортировочных горках появились стрелочные участки, оборудованные переводами типа Р65 с марками крестовины 1/6 и 1/9 вместо используемых долгое время переводов типов Р45 и Р50 с маркой крестовины 1/6. Возникшая ситуация вызвала необходимость адаптации существующих средств защиты к новым участкам контроля при условии обеспечения современных требований безопасности.
Применяемые многие годы средства защиты, включающие рельсовые
цепи, фотоэлектрические датчики и др., морально устарели и исчерпали свои возможности. Необходимость замены устаревших датчиков, как ненадежных, требует новых подходов к созданию современных устройств контроля стрелочных участков, обеспечивающих: непрерывный физический контроль за перемещением вагонов в стрелочной зоне, минимизацию ошибок обнаружения любых типов грузовых вагонов, непрерывный контроль собственной работоспособности и адаптацию к различным стрелочным переводам типов Р50, Р65 с марками крестовин 1/6 и 1/9.
Создание технического средства, автономно решающего поставленную задачу, в ближайшей перспективе маловероятно, поэтому предлагается объединять работу существующих и модернизируемых устройств с целью обеспечения поставленных требований, обеспечивая их комплексирование, что позволит обеспечить надежную защиты горочных стрелок от несанкционированного перевода их под вагонами.
Программой по безопасности горочных устройств на 2006-2007 годы запланировано оборудование более 1000 из 2482 централизованных стрелок современными идуктивно-проводными и радиотехническими датчиками.
В числе важнейших задач, благодаря которым можно выйти на качественно новый уровень автоматизации и механизации сортировочных процессов, стоит задача комплексированной защиты горочных стрелок от несанкционированного перевода их под вагонами. Предлагается на базе комплексирования создать надежную систему защиты стрелок от несанкционированного перевода на базе современных радиотехнических датчиков и идуктивно-проводных. Комплексирование этих датчиков позволит повысить вероятность обнаружения, надежность функционирования и повысит безопасность роспуска.
Оценка состояния современных средств защиты горочных стрелок
Напольные датчики обнаружения подвижных единиц в системах автоматизации сортировочных станций
На современном этапе развития средств железнодорожной автоматики происходит резкое расширение области применения и усложнение функций напольных датчиков для обнаружения и измерения параметров движения подвижных единиц. В широком понимании к датчикам обнаружения относятся все технические средства железнодорожной автоматики, функциональным предназначением которых является обеспечение обнаружения подвижных единиц (поезд, вагон, отцеп и т.п.) в зоне контроля.
Большое распространение напольные датчики получили в системах автоматики и телемеханики магистральных железных дорог для решения различного рода задач. Так в системах путевой перегонной и станционной автоматики это контроль занятия перегона или блок участка. В системах горочной автоматической централизации контролируется въезд колесных пар на локальные участки пути, включая контроль свободности стрелочных зон и расцеп вагонов на вершине горки. В автоматической локомотивной сигнализации осуществляется обмен информацией путь-поезд в локальной области, измерение параметров движения поезда с помощью бортовых датчиков. В системах горочной автоматизации роспуска составов измеряются параметры движения отцепов и их физические характеристики, контролируется въезд колесных пар на замедлители. В устройствах переездной сигнализации и ограждающих устройствах осуществляется контроль местоположения поезда, измерение скорости движения, обнаружение и фиксация неисправностей в буксовых узлах подвижного состава при его проследовании.
Таким образом, задача обнаружения подвижных единиц охватывает практически все ответственные системы управления технологическими процессами. Анализ условий работы и требований, предъявляемых к датчикам обнаружения, показывает, что наиболее полно они сконцентрированы в задачах, решаемых системами автоматизации и механизации сортировочного процесса. К ним относятся напольные условия эксплуатации в любой климатической зоне страны, необходимость обнаружения в фиксированной зоне участка пути и малое время анализа для принятия решения.
Многие задачи систем автоматизации решаются с использованием датчиков обнаружения: путевые датчики защиты стрелочных участков от несанкционированного перевода стрелок под вагоном, датчики счета осей, датчики педального типа для контроля отцепов на тормозных позициях, рельсовые цепи систем горочной автоматической централизации и т.п. Таким образом, к датчикам обнаружения в системах горочной автоматизации относятся практически все датчики напольного содержания, решающие главную задачу — зафиксировать (обнаружить) транспортный объект в ограниченной зоне контроля.
Все системы автоматизации и механизации сортировочного процесса можно условно разделить на следующие основные группы:
системы управления маршрутами движения отцепов;
системы управления скоростью движения отцепов;
системы управления скоростью надвига и роспуска составов и маневровых групп.
По выполняемым функциональным задачам выделяют следующие основные системы управления технологическими процессами сортировочных станций: горочная автоматическая централизация (ГАЦ МН); система управления скоростью скатывания отцепов (УУПТ); горочная автоматическая сигнализация для управления маневровыми локомотивами в процессе формирования составов с передачей информации по радиоканалу (ГАЛС Р);
В настоящее время на ряде горок еще эксплуатируется блочная горочная автоматическая централизация (БГАЦ) и системы ГАЦ с контролем роспуска — ГАЦ-КР. Однако эти системы сняты с производства, как морально и физически устаревшие. На смену им приходят микропроцессорные системы ГАЦ. Микропроцессорная система горочной автоматической централизации с накоплением вагонов (ГАЦ-МН) входит в состав комплексной системы автоматизированного управления сортировочным процессом (КСАУ СП), реализованной на станции Бекасово-Сортировочное Московской ж.д.
ГАЦ-МН обеспечивает заданные маршруты следования отцепов по спускной части сортировочной горки в сортировочный парк посредством управления стрелками по маршрутам движения отцепов. Микропроцессорные системы горочной централизации имеют неоспоримые достоинства при создании комплексных систем автоматизации сортировочных станций, поскольку позволяют достаточно просто сопрягать напольные источники первичной информации с системами высокого информационно — планирующего уровня.
В процессе роспуска вагонов система должна обеспечивать: безопасный роспуск вагонов, в том числе длиннобазных, синхронизацию трансляции маршрутных заданий и движения отцепов, исключение случаев регистрации ложной свободности стрелочного участка, в том числе, при единичных отказах напольных устройств, регистрацию нагонов и остановок отцепа на спускной части горки, контроль прохода локомотивов и маневровых групп по спускной части горки, исключение ударов при роспуске из-за негабарита.
ГАЦ-МН включает в себя функции горочного программно-задающего устройства (ГПЗУ), которые выполняет контроллер вершины горки (КВГ).
КВГ предназначен для приема программы роспуска из ГАЦ МН, контроля расцепа вагонов на вершине горки, управления горочным светофором, скоростью роспуска и указателем количества вагонов в отцепах, а также для контроля исправного состояния устройств вершины горки.
Для управления скоростью движения отцепов используются системы автоматизации регулирования скорости (АРС). На смену широко известных систем АРС, таких как APC-ЦНИИ, АРС-ГТСС, АСУ РСГ, КГМ РИИЖТ и их модификаций приходят адаптивные системы управления прицельным торможением. Принципиальным отличием микропроцессорной системы управления прицельным торможением (УУПТ) от предшествующих систем АРС является применение модулей управления замедлителями и системы контроля заполнения путей (КЗП) на базе индуктвно-проводных датчиков. Система прицельного торможения отцепов УУПТ входит в состав комплексной автоматизации процессов сортировочных горок.
Система УУПТ предназначена для автоматизации технологических процессов управления скоростью движения отцепов на тормозных позициях сортировочных горок различной мощности и степени механизации, оборудованных дистанционным управлением вагонными замедлителями. УУПТ обеспечивает управление вагонными замедлителями, трехпозиционное вытормаживание отцепов на основе результатов их поосного взвешивания и информации от КЗП, следит за скоростями скатывания отцепов на всем пути их движения от момента выхода из тормозной позиции до соударения (остановки) в сортировочном парке.
Система должна обеспечивать скоростной режим свободно скатывающихся вагонов, не допускающий их нагонов на спускной части горки, и прицельное торможение в заданной координате сортировочного пути. Вытормаживание отцепа должно осуществляться на допустимо низких (достаточных) ступенях торможения, обеспечивая плавное понижение скорости скатывания и достижение отцепом при выходе из тормозной позиции ускорения его свободного скатывания. Управляющие воздействия на замедлителях в автоматическом режиме должны быть ограничены величиной допустимого усилия нажатия для весовых категорий отцепов, находящихся в замедлителе, и величиной интенсивности торможения не более 4 м/с2.
Горочная автоматическая локомотивная сигнализация с передачей информации по радиоканалу (ГАЛС Р) реализует скоростные режимы надвига, роспуска, осаживания составов и вагонов и обеспечивает безопасность этих операций. ГАЛС Р контролирует местоположение горочных локомотивов в парке прибытия, на спускной части горки и в сортировочном парке, последовательность операций при реализации технологического процесса. ГАЛС Р реализует также и функции маневровой АЛС (МАЛС) с передачей информации по радиоканалу между постом электрической централизации (ЭЦ) и маневровыми локомотивами, работающими в выходной горловине сортировочного парка и в парке отправления по формированию поездов. Таким образом ГАЛС Р осуществляет непрерывный контроль за перемещениями и местоположением всех маневровых локомотивов, работающих на станции. ГАЛС Р ведет контроль за работой устройств СЦБ, оперативного персонала и машинистов в зонах своего действия. Информация о передвижениях на спускной части горки передается в ГАЛС Р из системы ГАЦ-МН. Скорость роспуска рассчитывается КВГ на основе сортировочного листка. Система формирует не менее трех значений скорости надвига и не менее шести значений скорости роспуска состава. Диапазон скоростей надвига и роспуска должен быть от 0,5 до 5,6 м/с.
Управление скоростью состава реализуется с погрешностью не более 0,1 м/с при поддержании скорости в диапазоне от 0,5 до 2,8 м/с и не более 0,3 м/с — в диапазоне от 2,8 до 5,6 м/с.
ГАЦ-МН осуществляет слежение за перемещением подвижных единиц на спускной части горки и во взаимодействии с ГАЛС Р позволяет обеспечивать безопасность совмещения таких технологических операций, как роспуск и маневры.
Реализуются новые функциональные задачи, связанные с комплексной диагностикой технических средств и систем, включающие самотестирование и диагностику устройств на автономном уровне с прогнозированием предотказных состояний.
Классификация датчиков обнаружения подвижных единиц
Все системы горочной автоматики и магистрального транспорта функционируют на базе напольных датчиков обнаружения и измерения параметров движения подвижных единиц с различными физическими принципами действия: индуктивные, оптические, механические, механоконтактные, радиотехнические, генераторные, телевизионные, акустические и др. В целом, требования эксплуатации, предъявляемые к путевым датчикам на промышленном железнодорожном транспорте, более жесткие по условиям надежности, за исключением ряда информационных показателей, таких как достоверность обнаружения и точность измерения параметров.
На железнодорожном транспорте датчики обнаружения охватывают большой комплекс устройств низовой автоматики, отличающихся по виду контролируемого параметра, принципам первичного преобразования и др. Несмотря на многообразие и обширную область применения для них характерна единая классификация по структуре, типу, признакам энергетического режима работы, схемному, информационному, конструктивному и физическим принципам работы их основных элементов (рис. 1.1).
По структуре датчики обнаружения подразделяются на одноканальные и многоканальные. В одноканальных датчиках проследование подвижной единицы фиксируется методом непосредственной оценки входного воздействия на преобразователь датчика, они просты в исполнении, относительно надежны и не требуют существенных затрат на их
эксплуатацию. Многоканальные датчики фиксируют воздействие подвижной единицы методом сравнения сигналов от нескольких самостоятельных преобразователей. По сравнению с одноканальными выделяются следующие положительные качества многоканальных датчиков: увеличивается чувствительность в целом; обеспечение помехозащищенности от влияния комплекса помех; компенсирование влияния износа, старения и воздействий ряда факторов внешней среды (температуры, влажности и др.).
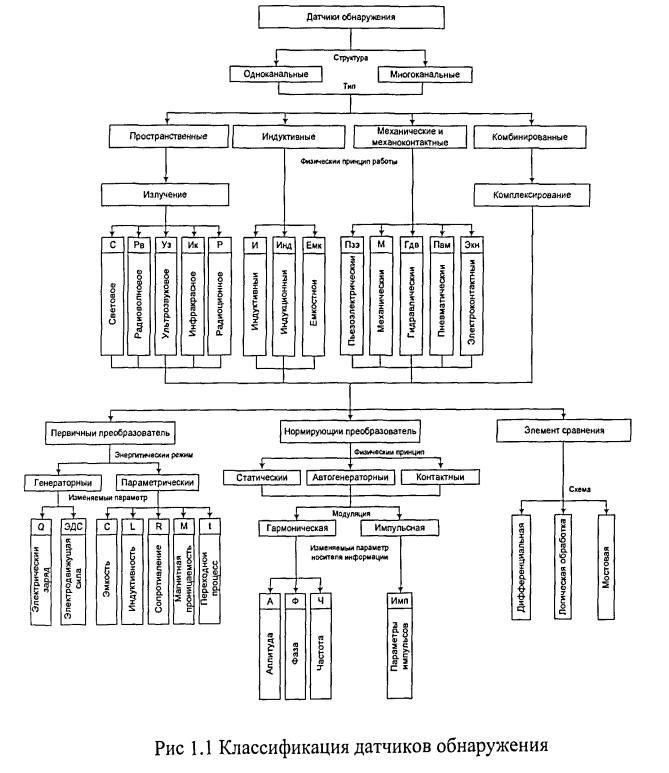
Среди всех датчиков обнаружения подвижных единиц можно выделить несколько основных типов:
пространственные, не имеющие физического контакта с объектом обнаружения и работающие по принципу экранирования или изменения параметров излучения. Этот тип датчика способен функционировать в любых условиях эксплуатации и характеризуется высокой надежностью работы;
индуктивные, бесконтактного действия, реагирующие на изменение параметра первичного преобразователя, как правило, индуктивность или емкость. Наиболее распространены датчики с резонансным принципом работы, который обеспечивает работоспособность теоретически в любом диапазоне скоростей движения подвижного состава, в разнообразных климатических условиях, при наличии мощных магнитных полей тягового тока и полей тяговых двигателей;
— механические и механоконтактные имеют физический контакт с объектом, рычажного или нажимного принципа действия (пьезоэлектрические, механические, гидравлические, пневматические) и использующие принцип шунтирования колесной парой участка рельсовой линии (электроконтактные). Недостатки механически взаимодействующих датчиков заключаются в зависимости надежности их работы от скорости движения и нагрузки на ось подвижного состава, климатических условий работы, ударных и вибрационных ускорений, загрязненности балласта и рельсов, а также значительной инерционности механизма и исполнительных элементов, что ограничивает область их применения;
комбинированные или комплектованные, использующие два или более датчиков, работающих на различных физических принципах и подобранных таким образом, чтобы усиливались лишь положительные качества, а отрицательные компенсировались.
По энергетическому режиму работы первичных преобразователей датчики делятся на:
параметрические, в которых подвижная единица вызывает изменение параметра его электрической или магнитной цепи (сопротивления, емкости, индуктивности, магнитной проницаемости, длительности переходного процесса);
генераторные (генераторы Холла, гармонических колебаний, пьезоэлементы, магнитоэлектрические, трансформаторы э.д.с), электрический сигнал в которых требует последующего преобразования для формирования унифицированных сигналов.
По принципу работы нормирующие преобразователи датчиков делятся на:
автогенераторные, применяемые, в основном, в одноканальных датчиках и выполняемые на основе регенеративных схем с положительными обратными связями;
магнитоконтактные (с герконами, поляризованными релейными вставками в датчиках с принципом магнитного поля);
статические (усилители и модуляторы всех видов). Применение нормирующих преобразователей позволяет: унифицировать их, повысить помехоустойчивость передачи сигналов; гальванически развязать и симметрировать относительно земли.
По типу элементов сравнения датчики разделяются на:
дифференциальные, требующие наличия двух источников питания (с первичными преобразователями генераторного типа);
— мостовые (с первичным преобразователем параметрического типа), для которых характерно повышенное потребление мощности источника питания моста, некоторое уменьшение чувствительности и более сложная балансировка плеч моста;
логической обработки, применяемые в многоканальных датчиках и выполненные на основе логических схем «И» либо «ИЛИ» и их сочетания. Сигналы датчиков обнаружения разделяются на непрерывные (свойственные датчикам без нормирующего преобразователя и с нормирующим
преобразователем статического типа) и дискретные, вырабатываемые нормирующими преобразователями магнитоконтактных и автогенераторных типов. Нормирующий преобразователь позволяет переводить сигнал первичного преобразователя в унифицированные сигналы тока и напряжения заданного уровня.
Некоторые типы генераторных и параметрических датчиков (дифференциально-трансформаторные, индукционные, индуктивные) выдают естественные непрерывные сигналы, мощности которых обеспечивают достаточную помехоустойчивость их передачи. У непрерывных сигналов носителем информации является амплитуда, фаза или частота, которые изменяются в соответствии с изменением контролируемой связующей энергии. В ряде случаев в ТПД используются одновременно два носителя информации, например: амплитуда и фаза или амплитуда и частота. При этом амплитуда выходного сигнала служит для целей обнаружения отказа или контроля работоспособности, а второй носитель информации служит для целей фиксации, контроля направления движения и счета осей подвижного состава. В двухканальных дифференциально-трансформаторных и индукционных датчиках для отметки прохода центра колеса с повышенной точностью используется переворот фазы сигнала. Импульсы дискретных сигналов характеризуются формой, амплитудой, длительностью, частотой следования и фазой импульсов. Фаза определяется положением импульсов после сдвига во времени относительно их начального положения.
Напольные датчики, эксплуатируемые на железных дорогах
Базовым устройством для обнаружения подвижных единиц остаются рельсовые цепи (РЦ), относящиеся к механоконтактному типу датчиков. РЦ выполняют наиболее ответственные функции путевого датчика информации о состоянии изолированных участков на перегонах, станциях, сортировочных горках, а также служат линией связи для организации непрерывной автоматической связи между поездами и устройствами, регулирующими движение поездов. На железных дорогах нашли применение многие виды РЦ, отличающиеся принципом действия, устройством и параметрами ее элементов, электрическими схемами включения. По принципу действия РЦ как путевые датчики разделяют на: нормально разомкнутые и нормально замкнутые. Рельсовые цепи, в которых контролируется работоспособность всех элементов, включая рельсовые нити, широко применяются в системах управления, обеспечивающих безопасность движения поездов. Нормально разомкнутые РЦ, в которых не контролируется исправность элементов и рельсовых нитей, нашли широкое применение на сортировочных горках. Особенность построения и специфика работы РЦ подробно описана во многих фундаментальных работах [1,2,4]. Рассмотрим только способность РЦ работать в сложных условиях эксплуатации.
Одним из основных параметров, определяющих нормальное функционирование РЦ как путевого датчика, является шунтовое сопротивление. Случайный характер изменения шунтового сопротивления может привести к пропуску подвижной единицы, что создает условия к снижению безопасности движения, в противном случае снижается пропускная способность или эффективность интервального регулирования. В системах горочной автоматики к коротким рельсовым цепям предъявляют дополнительные требования по быстродействию и недопустимости даже кратковременной потери шунта. На практике, из-за сильного загрязнения балласта и колесных пар снижается сопротивление балласта и возникают случаи кратковременной потери шунта [4], что снижает устойчивость работы горочных РЦ. Таким образом, рельсовая цепь, используемая для защиты от перевода стрелок под вагонами, не отвечает требованиям сегодняшнего дня по следующим причинам:
РЦ, даже в случае надежного обнаружения шунта колесных пар, не обеспечивает достоверного обнаружения ряда вагонов, относящихся к типу длиннобазных;
низкая надежность на фоне больших эксплуатационных затрат на их содержание;
РЦ (нормально разомкнутая) не позволяет осуществлять контроль работоспособности при отсутствии вагонов в стрелочной зоне.
Использование РЦ в качестве датчиков защиты не позволяет обеспечивать возрастающие требования к безопасности роспуска с одной стороны, а с другой — добиться сокращения эксплуатационных расходов, то есть обеспечить ресурсосбережение.
Другой разновидностью механоконтактного типа являются датчики, работающие на методе импульсного зондирования (ИЗ) [11]. Основная идея метода импульсного зондирования состоит в том, чтобы посылать в рельсовую линию импульс напряжения и по форме кривой переходного процесса тока рассчитывать длину свободной рельсовой линии. При реализации метода используется линейная зависимость длины свободной рельсовой линии от ее индуктивности, причем коэффициент пропорциональности не зависит от времени и погоды.
Недостатками этого типа датчиков являются:
- низкая надежность работы в зависимости от состояния рельсовой линии, стыковых соединителей и изолирующих стыков;
- случайный характер шунтового сопротивления, и как следствие, низкая устойчивость работы;
- большие эксплутационные расходы на их содержание.
Главная роль по количественному потреблению принадлежит точечным путевым датчикам (ТПД) или счетчикам осей (СО), решающим задачи контроля подвижной единицы в локальном участке пути, измерения параметров движения и обмена информацией с подвижной единицей [7,8]. Среди всего многообразия ТПД выделяются следующие типы: механически взаимодействующие с колесом подвижной единицы и бесконтактные (индуктивные). На промышленном железнодорожном транспорте переменяются следующие механоконтактные ТПД\ саморегулирующая просадочная педаль ПСП-2, рельсовые мембранные педали 10642М и ПР-65, пьезоэлектрический путевой датчик фирмы «Sumitomo Electric Industries» (Япония) и др. Недостатком механически взаимодействующих датчиков является низкая надежность работы из-за высокой чувствительности к ударным и вибрационным ускорениям, климатическим условиям работы, а также значительной инерционности механизма, что ограничивает область их применения.
В бесконтактных или индуктивных ТПД используется принцип изменения индуктивности первичного преобразователя или принцип электромагнитной индукции.
Магнитоконтактные точечные путевые датчики работают на принципе воздействия ферромагнитной массы колеса на релейную вставку датчика, вырабатывающую при срабатывании контактов электрический сигнал. К ним относятся магнитоконтактный датчик фирмы «Siemens» (Германия), датчик WSSB (Германия, Польша, Чехия) с поляризованной релейной и газозащищенной вставкой, магнитоконтактные путевые датчики ELS (Польша) и др. Датчики применяются преимущественно на сортировочных станциях и работают в диапазоне скоростей движения от 0 до 200 км/ч. К недостаткам этих датчиков следует отнести невысокую устойчивость к ударным и вибрационным воздействиям, высокие требования к герметичности контактов, а также самопроизвольная разрегулировка и невозможность определения направления движения.
Индуктивные точечные путевые датчики работают на принципе изменения индуктивности (коэффициента самоиндукции) первичного преобразователя вследствие изменения магнитного сопротивления его магнитной цепи. В качестве первичного преобразователя индуктивных ТПД используется катушка с сердечником, индуктивность которой изменяется от непосредственного воздействия на нее ферромагнитной массы колеса. К ним относятся путевой магнитоэлектронный датчик МЭД-2, электромагнитный индуктивный датчик INTEGRA (Швейцария), индуктивный датчик INDUSI (Германия), индуктивный датчик ASFA (Испания), датчик системы EBICAB [12] и др. Датчики применяются в системах путевой автоблокировки и переездной сигнализации и работают при скоростях 160км/ч и более. Недостатки этих датчиков: чувствительность к тяговым токам в рельсах, невозможность определения направления движения.
В индукционных датчиках используются генераторные первичные преобразователи, основанные на принципе электромагнитной индукции. В силу простоты их схемных и конструктивных решений и, как следствие, повышенной надежности они являются наиболее распространенным типом бесконтактного датчика и применяются на железных дорогах многих стран в двух основных модификациях: магнитоиндукционных и индукционных электромагнитных. К ним относятся магнитоиндукционная бесконтактная педаль ПБМ-56, магнитоиндукционные датчики фирм «Servo» №7788 и «General Electric» (США), датчик фирмы «SEL» (Германия), индукционные электромагнитные путевые датчики фирмы «Siemens» (Германия), трансформаторно-компенсационная педаль ТКП, дифференциально- трансформаторные датчики ДП50, ДП50П и ДП5-80 с преобразователем сигнала ПСДП-50-81, ДМ88 без источника питания, датчик AZL90 (Словения) [17]. К недостаткам датчика ПБМ-56 следует отнести: неработоспособность при малых скоростях движения, высокую чувствительность к внешним магнитным полям, наличие помех при вибрационных и ударных воздействиях рельса на датчик. Все индукционные датчики, за исключением ПБМ-56, работают в диапазоне скоростей до 160км/ч и применяются на сортировочных станциях, в системах контроля перегретых букс и в перегонных устройствах СЦБ. Датчики устойчиво работают в условиях вибраций и наводок от внешних магнитных полей, просты по своей конструкции и надежны.
Принцип действия резистивных ТПД основан на изменении связующей величиной активного сопротивления электрической цепи преобразователя. Применяются датчики, использующие принцип Гаусса, и электромагнитные резистивные датчики, в которых воздействие ферромагнитных масс колеса вносит дополнительное затухание и изменение сопротивления высокочастотного контура первичного преобразователя. Среди них магниторезистивный путевой датчик RACO №648-1 (США), вихретоковый путевой датчик CSEE №200 (Франция), вихретоковый капсульный датчик типа SSK фирмы «Siemens» (Германия), датчики УСО и УСО-М [13], многофункциональный датчик счета осей МФД-01[9,10], путевой датчик RSR (Германия) [16]. Датчики работают в диапазоне скоростей до 450 км/ч, при любых климатических условиях, способны определять направление движения, надежны, просты в эксплуатации и применяются на сортировочных станциях и перегонах.
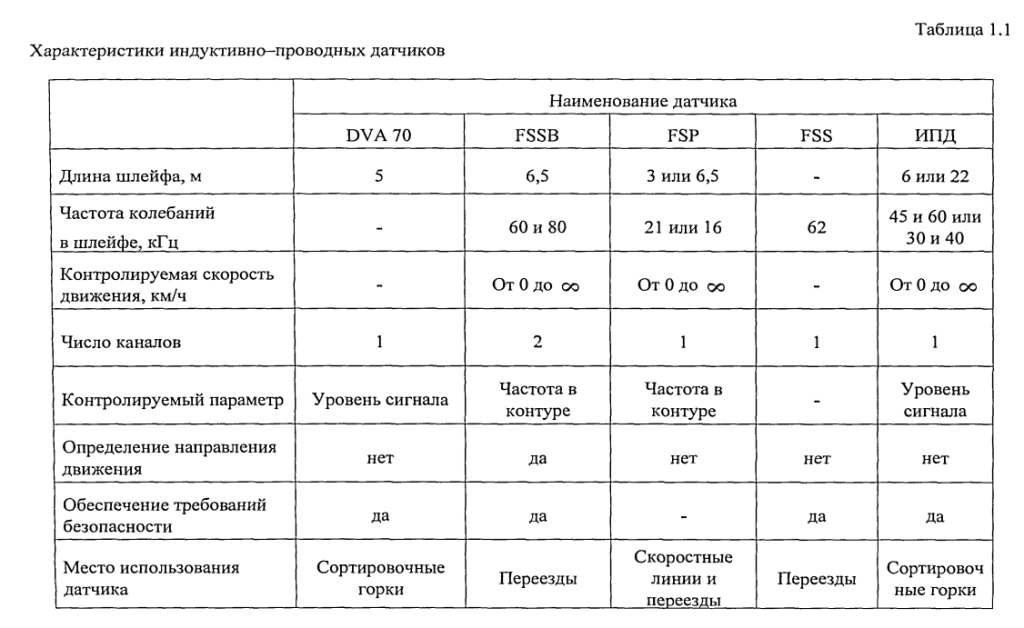
Используются датчики индуктивного типа, получившие название индуктивно-проводные, у которых в качестве чувствительного элемента используется индуктивный шлейф (ИШ), уложенный внутри рельсовой колеи и изменяющий свои параметры при наезде подвижной единицы. Такие датчики решают задачу обнаружения подвижной единицы на определенном участке пути и выдачи информации устройствам переездной сигнализации, горочной автоматики, путевой автоблокировки.
На данный момент используется несколько модификаций индуктивно- проводных датчиков (таблица 1.1), различающихся по контролируемому параметру на выходе датчика, длине используемого шлейфа, решаемой задаче и т.п.
Путевой датчик FSSB фирмы «Scheidt & Bachman» (Германия, Польша) [18] содержит два индуктивных шлейфа, уложенных друг за другом в форме восьмерки для исключения влияния со стороны рельсов и реагирует на изменение резонансной частоты колебательного контура автогенератора. Для предотвращения пульсаций амплитуд сигналов в шлейфах предусмотрено попеременное их включение. Датчик обеспечивает безопасность отказов, распознает направление движения и используется в системе переездной сигнализации.
Датчик FSS фирмы «Siemens» (Германия) [18,20,21] использует в качестве чувствительного элемента двойной индуктивный шлейф со скрещиванием и реагирует на изменение его активного сопротивления вследствие внесения затухания в колебательный контур. С целью защиты от опасных отказов применяют два независимых датчика, сигналы от которых обрабатываются двухканально. Датчик используется в переездной сигнализации.
Фирма «Pintsch Bamag» (Германия) разработала индуктивно-проводной датчик FSP [18,21], служащий для определения местонахождения поезда при любой скорости, от максимальной до нуля. Локация может осуществляться в зависимости или независимо от направления движения. На шлейф, уложенный в колее со скрещиванием, воздействует только металлическая масса поезда, остальные факторы не оказывают на него влияния.
В Польше для автоматизированных сортировочных горок разработан индуктивный шлейф-идентификатор DVA 70 [23,24], размещенный на горбу горки. Шлейф уложен в колею в форме петли, рельсовые нити замкнуты накоротко шунтами. Устройство позволяет фиксировать момент отрыва отцепа, контролировать фактическое число осей в отцепе, правильность расцепа вагонов и выявлять длиннобазные вагоны.
Индуктивно-проводной датчик (ИПД) [14] разработан специалистами НИИЖА для сортировочных станций и служит дополнительным элементом защиты стрелок от несанкционированного перевода при потере шунта и проходе длиннобазных вагонов, а также в системе контроля заполнения путей (КЗП) сортировочного парка как датчик обнаружения движущихся отцепов. ИПД позволяет обнаруживать подвижную единицу в зоне укладки индуктивного шлейфа вне зависимости от климатических и эксплутационных условий. На сортировочных путях используется разная длина шлейфа, исходя из конкретной решаемой задачи. В системе защиты стрелок используются ИШ, уложенные в форме петли, размеры которых выбираются в зависимости от конкретных размеров предстрелочного участка и не превышают бм. В системе КЗП длины ИШ выбираются, исходя из геометрических размеров подвижных единиц, и составляют 22м, которые уложены со скрещиванием. В горочной автоматической централизации ИПД заменяет ФЭУ и ТПД. Датчик позволяет контролировать любые скорости движения оцепов и обеспечивает безопасность отказов.
Другим типом датчиков, широко используемых на железных дорогах являются, пространственные датчики обнаружения, работающие в режиме пространственного контакта с обнаруживаемым объектом. Наиболее распространены датчики, работающие в следующих диапазонах волн: ультразвуковые, оптические, радиоволновые [8].
Ультразвуковые датчики сильно подвержены влиянию колебаний в диапазоне, сопровождающих работу подвижного состава, и не могут рассматриваться как альтернативные оптическим и радиотехническим. Оптические, датчики хотя и нашли применение на железных дорогах, однако области применения их использования весьма ограничены. Примером такого датчика может служить фотоэлектрическое устройство (ФЭУ), используемое как средство дополнительной защиты стрелки от перевода под вагонами на сортировочных горках и в метрополитене. Достоинством ФЭУ является простота реализации и эксплуатации. Недостатками использования оптического диапазона являются:
- сильная зависимость затухания волн от состояния атмосферы (дождь, туман, снег, пыль);
- из-за наличия отражающих поверхностей на различных конструкциях вагонов в приемник попадает отраженный свет, в результате чего вырабатывается команда ложной свободности.
Радиотехнические датчики (РТД), реализующие диапазон радиоволн СВЧ излучения находят большое применение на железнодорожном транспорте. РТД могут работать в двух режимах: обнаружение посредством отраженного сигнала (канал отраженного сигнала КОС) и обнаружение в результате экранирования подвижной единицей сигнала, излучаемого передатчиком (канал прямого сигнала КПС). Основным отличием РТД является их работа в сантиметровом (СВЧ) диапазоне электромагнитных волн, где используется свойство этого диапазона волн отражаться от обнаруживаемых подвижных единиц.
Особенностью работы таких датчиков является расположение их в зоне постоянных вибрационных воздействий, большой диапазон температурных изменений, постоянное воздействие климатических факторов (снег, туман, дождь и т.п.) и эксплутационных (сильная запыленность, постоянное загрязнение горюче-смазочными материалами), малая дальность обнаружения, значительная протяженность обнаруживаемых объектов. Поверхности вагонов имеют сложную структуру и разные отражающие свойства. Подвижные единицы должны обнаруживаться в строго ограниченной зоне при наличии в непосредственной близости от нее, а нередко и в ней мешающих предметов, обладающих хорошими отражающими свойствами (верхнее строение пути, опорные столбы, вагоны на соседних путях).
Радиотехнический датчик контроля свободности стрелочных участков (РТД- С) [15] разработан учеными и специалистами МИИТа и НИИЖА. Выпускаются следующие модификации датчика: с одним передающим и двумя приемными модулями (РТД-С1), применяется на стрелочных участках сортировочных горок в системах ГАЦ и APC, а также с одним передающим и двумя приемными модулями (РТД-С2, РТД-СЗ). Комплект РТД-СЗ рекомендуется использовать взамен ФЭУ, а также для контроля проезда транспортными средствами локальных участков пути. Преимуществом двухканального варианта построения является возможность контроля работоспособности каждого из каналов.
РТД-С работает в СВЧ диапазоне электромагнитных волн, в частности сантиметровом (9,1-9,5ГГц), в котором воздействие атмосферных осадков вызывает меньшее затухание волн по сравнению с оптическим диапазоном.
Опыт эксплуатации РТД-С на сортировочных горках показал высокую надежность их работы в сложных условиях эксплуатации и достоверность обнаружения вагонов любого типа.
Сравнительный анализ различных типов датчиков
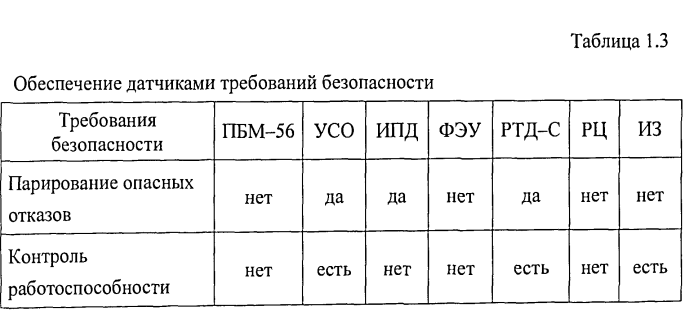
Эффективность использования названных типов датчиков обнаружения подвижных единиц зависит, главным образом, от способности работать в условиях постоянного загрязнения, вибраций и в сложных климатических условиях. Кроме того, в [26] зафиксировано, что «напольные устройства контроля участка предназначены для решения задач обнаружения транспортных средств (вагон, отцеп, локомотив и т.п) в установленной по протяженности либо габаритам зоне контроля с высокой достоверностью, обеспечивая высокую надежность функционирования в любых погодных условиях, парирование опасных отказов и дистанционный контроль работоспособности». В таблице 1.2 в систематизированном виде приведены степени влияния различных эксплутационных факторов на работу разных типов напольных датчиков обнаружения, в таблице 1.3 показано обеспечение требований безопасности напольными датчиками. Плюсами показана зависимость работы системы от указанных эксплутационных факторов, минусами отмечено отсутствие зависимости. В рассмотрение приняты наиболее распространенные напольные датчики, используемые в системах горочной автоматизации для решения задачи контроля участка пути.
Видно, что использование датчиков механоконтактного типа, использующих в качестве чувствительного элемента рельсовую линию, представляется нерациональным по следующим причинам:
- зависимость от состояния балласта и сопротивления рельсовой линии;
- низкая надежность обнаружения поездного шунта;
- низкая надежность работы на фоне больших эксплутационных затрат.
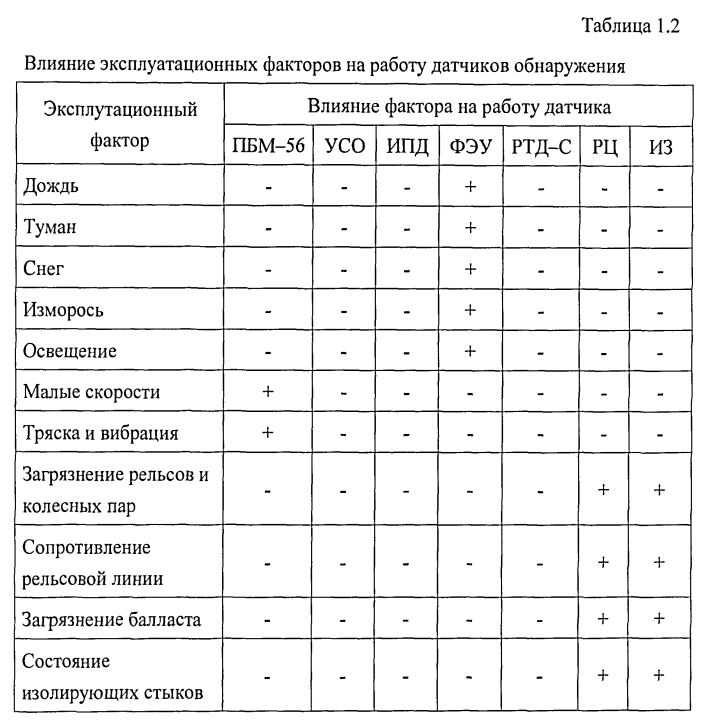
Кроме того, короткие, нормально разомкнутые рельсовые цепи:
— не обнаруживают ряд вагонов относящихся к длиннобазным;
— не позволяет осуществлять контроль работоспособности при отсутствии вагонов в стрелочной зоне.
Фотоэлектрический датчик обладает низкой работоспособностью и не отвечает требованиям безопасности, кроме того, ФЭУ снят с производства и повсеместно заменяется на РТД-С, поэтому в дальнейшем его из рассмотрения исключаем.
Радиотехнический датчик РТД-С характеризуется высокой надежностью функционирования и достоверностью обнаружения вагонов любых типов в любых эксплутационных условиях. Технология обслуживания датчиков предельно упрощена и сводится лишь к внешнему осмотру не чаще чем один раз в неделю. Возможность дистанционного контроля работоспособности позволяет обеспечить режим обслуживания датчика по мере необходимости и высокий уровень безопасности.
Точечные датчики педального типа обеспечивают контроль за колесными парами в зоне, не превышающей 0,5-г0,7 метра, что не отвечает требованиям безопасности. Использование медленнодействующих исполнительных реле как бы искусственно увеличивает зону контроля. Точечные датчики педального типа ПБМ-56 не являются существенно надежными из-за низкой чувствительности к скорости движения отцепа, высокой чувствительности к внешним магнитным полям и влияния на работоспособность ударных и вибрационных воздействий. Дифференциально-трансформаторные датчики ДП50 и ДП50П в которых частично устранены указанные недостатки, заменяют педаль ПБМ-56. Электромагнитные системы датчиков впервые вибро и электрически изолированы от рельса. Они не чувствительны к токам, протекающим в рельсе. Датчик ДП50П позволяет определять направление движения каждой оси. Датчик УСО обеспечивает контроль исправного состояния и, при въезде колеса в зону действия, способен определять направление движения. Он не чувствителен к внешним магнитным полям и способен функционировать в любых условиях эксплуатации. Разновидность счетчика осей УСО-М позволяет фиксировать стоячую ось, находящуюся в зоне действия датчика.
Индуктивно-проводной датчик ИПД способен работать в любых условиях эксплуатации и обеспечивать парирование опасных отказов, кроме того, зона контроля датчика изменяется в зависимости от протяженности индуктивного шлейфа.
Ввиду сказанного выше очевидно, что использование РЦ в качестве устройства контроля участка представляется малоэффективным, поскольку не отвечает требованиям безопасности. Из ТПД лишь датчик УСО может быть рекомендован только для дублирования обнаружительных функций.
Тем не менее, несмотря на положительный опыт эксплуатации датчиков РТД-С, высокая ответственность в обеспечении безопасности роспуска вагонов по стрелкам требует дублирования обнаружительных функций другим датчиком. Наибольший эффект по достоверности обнаружения и надежности может быть достигнут путем оптимального комплексирования датчиков, причем датчиков, базирующихся на разных физических принципах действия.
Таким образом, в качестве датчиков для защиты стрелок в настоящее время целесообразно использовать радиотехнический (РТД-С) и индуктивно-проводной (ИПД), обеспечивающие высокую достоверность обнаружения и надежность функционирования в любых погодных условиях.
Критерии подбора датчиков обнаружения подвижных единиц
Все датчики контроля подвижных единиц в системах горочной автоматизации относятся к устройствам, обеспечивающим надежное функционирование систем и безопасность роспуска. Поэтому к ним предъявляются повышенные требования по инерционности и достоверности обнаружения подвижных единиц в ограниченной зоне контроля.
Достоверность обнаружения подвижных единиц
Обнаружение подвижных единиц происходит в условиях большого числа мешающих факторов, которые носят случайный характер. Различные конструкции обнаруживаемых вагонов, их отражающие свойства, шунтовое сопротивление, скорости движения, погодные и климатические воздействия в условиях постоянных механических вибраций — все эти факторы могут влиять на принятие ошибочного решения датчиками обнаружения. Возможны ошибки двух видов: пропуск объекта и ложная фиксация.
Степень риска в результате различных ошибок определяется спецификой решаемой задачи. Так, эффективность работы системы горочной автоматики определяется степенью повышения перерабатывающей способности. В этом случае ошибки обоих видов приводят к задержке расформирования. В первом случае (пропуск) возможны сходы вагонов, во втором (ложная фиксация) — посылка вагонов не по заданному маршруту, увеличение интервалов попутного следования. Оба случая приводят к снижению перерабатывающей способности.
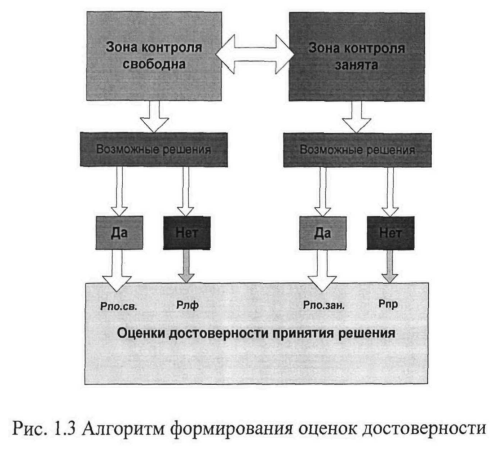
В зоне контроля возможны следующие ситуации:
- Подвижной единицы в зоне контроля нет. В этом случае датчик обнаружения должен регистрировать свободность участка. В противном случае датчик выдает ошибочное решение. Оба события характеризуются вероятностями: правильного обнаружения свободности и ложной фиксации. Вероятность ложной фиксации (Рлф)- это событие, характеризующее ошибочное решение датчика обнаружения.
- Подвижная единица находится в зоне контроля. В этом случае правильным решением датчика является регистрация занятости участка контроля. В ином случае датчиком принимается неверное решение. Оба события характеризуются соответственно вероятностями правильного обнаружения занятости и пропуска объекта. Вероятность пропуска (Р„р)- это событие, характеризующее ошибочное решение датчика обнаружения.
Как в первой ситуации, (фактической свободности участка) так и во второй (фактической занятости участка), ошибочные решения в совокупности определяют достоверность функционирования датчика обнаружения (рис. 1.3). Основным критерием функционирования обнаружителя является достоверность и своевременность обнаружения объекта в зоне контроля.
При реализации порогового алгоритма работы, что имеет место для всех путевых датчиков, фиксация занятости происходит для РЦ либо при превышении преобразуемой величиной некоторого порогового значения (первый алгоритм), либо, наоборот, при значении преобразуемого параметра ниже порогового (второй алгоритм).
По первому алгоритму вероятность правильной фиксации контролируемого объекта
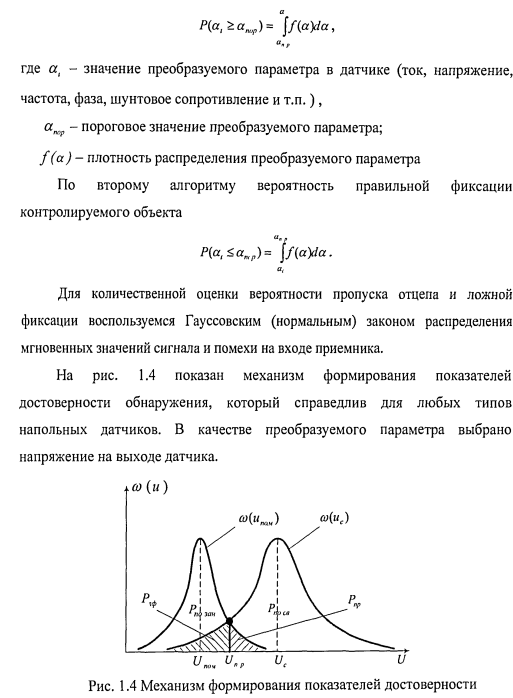
Коэффициент зоны контроля
Инерционность датчиков обнаружения
Инерционность работы датчиков обнаружения в контролируемой зоне определяется: алгоритмом работы, физическими принципами реализации, используемой элементной базой.
Большой динамический диапазон движения подвижных единиц железнодорожного транспорта, требования повышения перерабатывающей способности горок и пропускной способности магистралей выдвигают в качестве одного из основных показателей датчиков обнаружения подвижных единиц работу в реальном масштабе времени протекания технологического процесса. Ограничения, накладываемые на длину ЗК, еще больше усиливают требование минимизации времени фиксации подвижных единиц в зоне контроля.
Фактическое время нахождения подвижной единицы в зоне контроля:
Поскольку сигнал в приемном устройстве датчика не может мгновенно измениться до уровня, фиксируемого пороговым устройством, то момент принятия решения датчиком обнаружения при появлении в ЗК подвижной единицы носит случайный характер. Уровень сигнала на выходе приемника изменяется постепенно и зависит от характера поверхности подвижной единицы, настройки датчика и его параметров. Время принятия датчиком решения о наличии подвижной единицы на границе ЗК 1р определяется требуемой вероятностью обнаружения p(t). В свою очередь, p(t) определяется мгновенной плотностью вероятности обнаружения в течение короткого промежутка времени ydt.
Интенсивность (мгновенная плотность вероятности) числа обнаружений ТС в ЗК:
Обнаружение объектов на границах зоны контроля
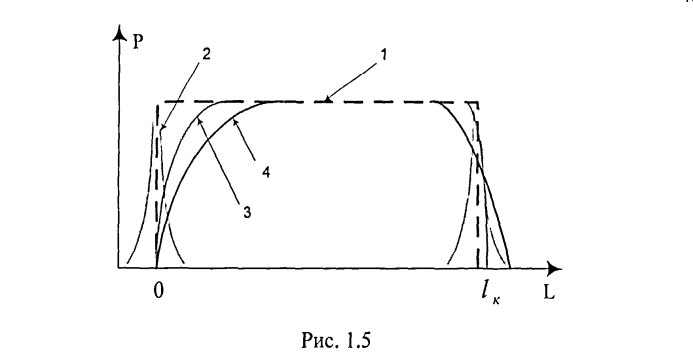
Очевидно, на датчиках точечного действия (кривая 2) можно построить обнаружитель, перекрывающий всю зону контроля. Но для этого их должно быть столько, сколько потребуется для перекрытия всей длины зоны. Так, если зона обнаружения датчика составляет 0,5м, а длина зоны контроля — 12м, то их потребуется около 25 штук. Другим вариантом использования датчиков точечного действия (кривая 2) для обнаружения объекта в зоне контроля является введение логических алгоритмов обработки сигналов первичного датчика. В частности, алгоритма счёта и памяти, когда критерием занятости зоны контроля является большее число обнаружений, зарегистрированное первым датчиком, чем вторым. В случае равенства числа регистраций объекта первым и вторым датчиком считается, что участок свободен.
Эффективность использования различных типов датчиков возрастает, когда они имеют перекрывающиеся зоны обнаружения. В этом случае подвижная единица будет надежно фиксироваться по всей длине зоны контроля.
Рассмотрим подробней возможности различных промышленных датчиков обнаружения на примере задачи защиты стрелки.
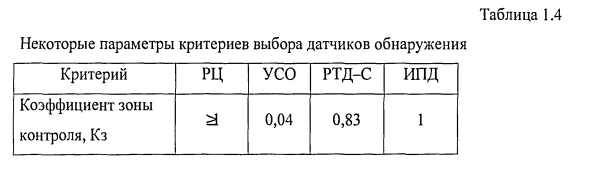
Как видно из таблицы 1.4, только РЦ и ИПД позволяют обнаруживать объекты по всей длине зоны контроля, но РЦ не может использоваться, как самостоятельное устройство ввиду отмеченных выше недостатков; кроме того, использование РЦ не позволяет достичь требуемых характеристик достоверности [8]. Все остальные датчики (УСО, РТД-С, ИПД) обладают
высокими характеристиками достоверности, обеспечивая требуемый уровень безопасности.
Наиболее перспективными датчиками для использования в задачах защиты стрелок от несанкционированного перевода по таким критериям как длина зоны обнаружения и непрерывный контроль работоспособности являются РТД-С и ИПД.
Эти датчики реализуют различные принципы действия, и их совместная работа может стать эффективным средством повышения безопасности проезда централизованных стрелок.
Однако если работа радиотехнических датчиков РТД-С исследована достаточно полно [50,51,52,53], то работа ИПД исследована весьма ограниченно. Особенно это относится к использованию ИПД для защиты стрелок.
В этой связи представляется целесообразным провести дополнительные исследования ИПД в условиях работы горочных стрелок.
Ни один из датчиков самостоятельно не может обеспечить заданные жесткие требования для обнаружения подвижных единиц в стрелочной зоне, поэтому для решения поставленной задачи необходимо совмещать их работу. Вариантом решения этой задачи могут быть известные различные методы: дублирование, резервирование и комплексирование.
Выводы и постановка задач исследований
- Произведена классификация напольных датчиков обнаружения подвижных единиц, используемых на железных дорогах.
- Предложен ряд критериев сравнительной оценки путевых датчиков обнаружения, отражающих специфику их функционирования в системах автоматизации сортировочных станций.
- Выполненный анализ существующих средств защиты горочных стрелок показывает, что из всех датчиков по длине зоны обнаружения и потенциальными возможностями обнаружения подвижных единиц наиболее перспективными, отвечающие требованиям безопасности и надежности являются лишь два: радиотехнический и индуктивно-проводной.
- Показана необходимость совместной работы существующих напольных датчиков контроля подвижных единиц, так как ни один из них не обеспечивает современных требований к обнаружению объектов в стрелочной зоне.
- Работа индуктивно-проводного датчика как перспективного для защиты горочных стрелок в настоящее время мало изучена. Неизученной остается специфика работы индуктивного шлейфа как чувствительного элемента индуктивного датчика генераторного типа — ИПД. Это требует дополнительных исследований для обоснования принятия решения о целесообразности применения ИПД для защиты горочных стрелок от несанкционированного перевода.
Список литературы
- Аркатов B.C. и др., Рельсовые цепи магистральных железных дорог. М.: Транспорт, 1982,358 с.
- Сагайтис A.C., Соколов В.Н. Устройства механизированных и автоматизированных сортировочных горок. — М. Транспорт, 1988.
- Иванченко В.Н. Микропроцессорные информационно-управляющие системы автоматизации сортировочных процессов. Ростов-на-Дону: РИИЖТ, 1984,-96 с.
- Модин Н.К. Механизация и автоматизация станционных процессов. — М.: Транспорт, 1985. — 275с.
- Фонарев Н.М. Автоматизация процесса расформирования составов на сортировочных горках. — М.: Транспорт, 1971 — 271 с.
- Муха Ю.А., Харланович И.В., Шейкин В.П. и др. Автоматизация и механизация переработки вагонов на станциях. — М.: Транспорт, 1985.-248 с.
- Бухгольц В.П., Красовский Г.А., Штанке А.Э. Путевые датчики контроля подвижного состава на рельсовом транспорте. М.: Транспорт, 1976. 95 с.
- Шелухин В.И. Датчики измерения и контроля устройств железнодорожного транспорта. М.: Транспорт, 1990. 119 с.
- Галкин О.В., Шабалин А.Н. Многофункциональные датчики счета осей. «Автоматика связи и информатика». 2004, №11, с. 6-8
- Татиевский С.А. Технические характеристики датчиков счета осей. «Автоматика связи и информатика». 2003, №1, с. 7-8
- Грачев Г.Н., Гуменик М.Б. Контроль заполнения путей методом импульсного зондирования. «Автоматика связи и информатика». 2005, №1, с. 8-9
- Власко C.B. Автоматическая локомотивная сигнализация точечного типа на железных дорогах Европы. «Автоматика связи и информатика». 2005, №1, с. 46-48
- Устройство считывания осей УСО. Техническое описание и руководство по эксплуатации. М., 2004, — 19 с.
- Датчик индуктивно-проводной. Техническое описание и инструкция по эксплуатации. М., 1998, — 21 с.
- Датчик радиотехнический контроля свободности стрелочных участков РТД-С. Техническое описание и инструкция по эксплуатации. М., 1986,- 28 с.
- Lau Р., Altehage К. Рельсовый датчик, устойчивый к воздействию вихретокового тормоза. «Signal und Draht». 2002, № 9, с. 44 — 47.