Цикл статей:
Глава 1 – Комплексирование средств защиты горочных стрелок от несанкционированного переводаГлава 2 – Исследование индуктивных шлейфов напольного датчика обнаружения подвижных единиц ипд
Глава 3 – Комплексирование напольных датчиков обнаружения подвижных единиц
Глава 4 – Экспериментальные исследования комплексированной защиты горочных стрелок
Автоматизация технологических процессов сортировочных горок реализует с помощью технических средств множество функций, в которых на первый план выдвигаются такие показатели, как безопасность, достоверность и точность обнаружения подвижных единиц на участках контроля. Достоверность, в основном, реализуется с помощью датчиков обнаружения подвижных единиц в ограниченных зонах контроля. К таким важнейшим задачам относятся функции контроля расцепа вагонов на вершине горки, контроль проследования отцепов по участкам маршрута движения, контроль наличия отцепа в зоне стрелочного участка, определение координаты положения вагона на замедлителях тормозных средств и др.
Высокие требования к точности измерения параметров движения реализуются в задачах обеспечения торможения отцепов в замедлителях и регулирования скорости скатывания их по спускной части горки. Требования достижения высокой точности измерений относятся и к реализуемым функциям прицельного торможения отцепов на парковых путях.
Известные методы построения технических средств, такие как дублирование и резервирование, предназначены в основном для повышения их надежности и живучести. Однако в ряде случаев требуется и высокая достоверность функционирования технических средств. Использование названных методов позволяет в некотором смысле повысить и достоверность решаемых задач техническими средствами, в частности, в задачах обнаружения подвижных единиц в ограниченной зоне контроля. Однако произвольный, необоснованный выбор средств резервирования или дублирования не всегда позволяет достигнуть требуемых показателей достоверности. Количество средств дублирования может неоправданно увеличиваться, а в итоге в определенных условиях функционирования, требуемые показатели достоверности окажутся недостижимыми. В этой связи предлагаемый метод комплексироваиия технических средств для обнаружения и измерения параметров движения подвижных единиц восполняет недостатки, свойственные методам дублирования и резервирования.
Принципы комплексироваиия датчиков обнаружения
В отличие от методов резервирования и дублирования, комплексирование — это метод, реализующий специальный подбор технических средств (датчиков обнаружения), функционально решающих одну и ту же задачу, работающих одновременно (в параллель), как при дублировании, и обеспечивающий наряду с заданными характеристиками надежности требуемые показатели достоверности. Ниже рассматривается задача комплексироваиия технических средств обнаружения подвижных единиц в зоне контроля.
Датчиком обнаружения считается такой, который реализует функциональную задачу обнаружения (контроля наличия) объекта по всей длине зоны контроля, то есть с момента вступления объекта в зону контроля и до момента полного ее освобождения. Регистрирующий сигнал о занятости участка контроля должен поступать непрерывно на исполнительный элемент на протяжении всего времени нахождения обнаруживаемого объекта в зоне контроля.
Подбор технических средств комплексироваиия ведется по следующим признакам:
- В качестве комплексируемых устройств (датчиков обнаружения) используются одновременно два и более технических средств, работающих в параллель, как при дублировании, реализующих различные принципы действия и решающих одну и ту же задачу: достоверное обнаружение подвижных единиц в контролируемой зоне.
- Изменение окружающих внешних условий оказывает на характеристики комплексируемых технических средств различное (в идеале противоположное) воздействие.
- Один датчик имеет большую протяженность зоны обнаружения, но обладает невысокой достоверностью, а второй или другие — меньшую по длине зону обнаружения и более высокую достоверность обнаружения.
- Один датчик осуществляет непрерывное обнаружение по всей длине зоны контроля, а другие (другой) обнаруживают объект с высокой достоверностью в дискретных точках или в дискретные моменты времени.
При этом одни датчики обладают высокой достоверностью обнаружения на границах зоны контроля и низкой достоверностью обнаружения на других участках, а другие — наоборот. - Один датчик обладает высокой точностью обнаружения объектов, находящихся в статическом состоянии при плохих динамических характеристиках, а другой, наоборот, имеет хорошие динамические характеристики при низких характеристиках для статических либо малоподвижных объектов.
Комплексирование может быть осуществлено и на одном техническом устройстве, реализующем различные признаки обнаружения подвижных единиц.
Критерием достоверности комплексированных датчиков является вероятность ошибки обнаружения (совокупность вероятности пропуска и ложной фиксации). Структурные связи между комплектуемыми датчиками обнаружения выбираются таким образом, чтобы положительные качества датчиков дополняли друг друга, а отрицательные компенсировались либо минимизировались.
Таким образом, комплексирование предполагает структурную избыточность устройства, решающего заданную задачу. В частности, в задачах защиты горочных стрелок от перевода под вагонами комплексирование предполагает использование двух или большего числа датчиков, в совокупности удовлетворяющих вышеназванным критериям.
Эффективность комплексирования защиты стрелок от несанкционированного перевода состоит в оптимизации следующих решений: - Минимизация количества используемых технических средств за счет структурной избыточности комплексированных обнаружителей.
- Минимизация вероятностей пропуска и ложной тревоги, как следствие, повышается достоверность обнаружения объекта в зоне контроля.
- Максимизация используемых избыточных функциональных возможностей к омплексируемых датчиков в задачах автоматизации управления роспуском вагонов (дистанционная диагностика, парирование опасных отказов и т.д.).
Критерии эффективности комплексирования датчиков обнаружения
Эффективность комплексирования целесообразно оценивать по отношению вероятности ошибочного решения одного из датчиков (Д,Д2,…Д), входящего в состав комплексируемых, к общей вероятности ошибки обнаружения комплексированного обнаружителя:

В ряде случаев в системах, обеспечивающих безопасность, обнаружение подвижных единиц в зоне контроля, эффективность комплексирования может оцениваться дифференциальным критерием, характеризующим выигрыш в вероятности пропуска или ложной тревоги. Значимость выбираемого критерия определяется риском последствий от ошибки того или иного рода.

В системах, обеспечивающих безопасность движения, где риск ошибки типа пропуск сопряжен с человеческими жертвами или крайне большими материальными потерями, приоритет следует отдавать критерию у. В системах горочной автоматики ошибка обоих типов может приводить к одинаковым последствиям, связанным с боем вагонов, существенным потерям, связанным с остановкой роспуска, порчей груза и т.п. В этой связи предпочтение следует отдавать интегральному критерию — общей вероятности ошибочного принятия решения уош. При этом очевидно, что при оценке характеристик достоверности обнаружения вагонов в контролируемой зоне необходимо учитывать априорные вероятности наступления каждого из событий, которые могут повлечь ту или иную ошибку. Так, ложная фиксация может наступить лишь в случае отсутствия объекта в зоне контроля, а пропуск объекта — в случае наличия объекта в зоне контроля. Априорные вероятности наступления каждого из событий коррелированны как с интенсивностью роспуска вагонов, так и с удаленностью зоны контролируемого стрелочного участка по маршруту движения отцепов.

Решение о целесообразности комплексирования должно быть основано на качественной оценке возможного использования технических средств в соответствии с выражениями (3.1 — 3.3). Такой подход является общим как при необходимости модернизации действующих систем железнодорожной автоматики, так и при разработке новых перспективных систем управления движением отцепов на сортировочных горках.
Характеристики достоверности обнаружения для различных датчиков с учетом влияющих факторов
В настоящее время на сортировочных станциях используется множество напольных устройств, реализующих задачу обнаружения подвижных единиц в ограниченной зоне контроля. В системах защиты стрелок зона контроля имеет длину стрелочного участка. Среди существующих напольных датчиков, кроме рельсовой цепи выделяются два основных типа: точечные датчики индуктивного типа (педали, УСО) к которым относится индуктивно-проводный датчик (ИПД), и датчики пространственного типа (РТД-С1).
Важнейшим показателем функционирования напольных датчиков является достоверность обнаружения подвижных единиц. Рассмотрим характеристики достоверности эксплуатируемых датчиков.
Нормально-разомкнутая рельсовая цепь (ГРЦ) фиксирует наличие отцепа в случае, если сопротивление шунта не превышает нормативное, т. е. Rш < Rн. Если сопротивление шунта превышает пороговое значение (Яш> Япор), приемник РЦ не фиксирует наличие отцепа, несмотря на то, что,
на самом деле, он находится в контролируемой зоне. Таким образом, принимается ошибочное решение, которое оценивается вероятностью пропуска отцепа РЦ:






Тем не менее, в настоящее время вариант РТД-С1 с КОС не используется в эксплуатации и поэтому остается вне рассмотрения. Индуктивно-проводной датчик ИПД обнаруживает отцеп в зоне укладки индуктивного шлейфа, который изменяет свои параметры от наезда вагона. Первичным источником информационного сигнала ИПД является автогенератор с двухконтурной колебательной системой. Колебательные контура (рис. 3.1) образованы высоко добротной катушкой индуктивности LI с сосредоточенными параметрами и индуктивным шлейфом с распределенными параметрами и низкой добротностью. В свободном






Критерии обеспечения требуемой достоверности обнаружения ИПД для различных признаков обнаружения








Существуют специальные критерии (Неймана-Пирсона, идеального наблюдателя и др.), позволяющие оптимизировать пороговый уровень. Кроме того, путем оптимизации координат размещения индуктивного шлейфа ИПД в зоне стрелочного участка и соответствующей юстировки (настройке) автогенератора как источника первичной информации, возможно обеспечение требуемых характеристик обнаружения вагонов при минимальной вероятности ошибки.
На железнодорожном транспорте априорные вероятности наступления событий существенно неравнозначны и не определены. Таким образом, выбор порогового напряжения обнаружения отцепов в зоне контроля определяется известным критерием обнаружения (Неймана-Пирсона) и требует рассмотрения вопроса оптимизации настройки автогенератора ИПД как первичного источника информации (сигнала).
Критерии обнаружения отцепов и требуемые характеристики обнаружения Рпр и Рлф для радиотехнического датчика РТД-С1 с каналом
КПС были подробно рассмотрены в работах [51,52,53]. Поскольку ИПД, эксплуатируемый в настоящее время ведет обнаружение, как и РТД-С1, по амплитудному признаку, то механизм обеспечения требуемых характеристик достоверности применим и в нашем случае.
Рассмотрим вопрос обеспечения требуемых характеристик обнаружения путем оптимизации порога срабатывания ИПД и выбора
рабочих уровней сигнала автогенератора при использовании амплитудного признака.
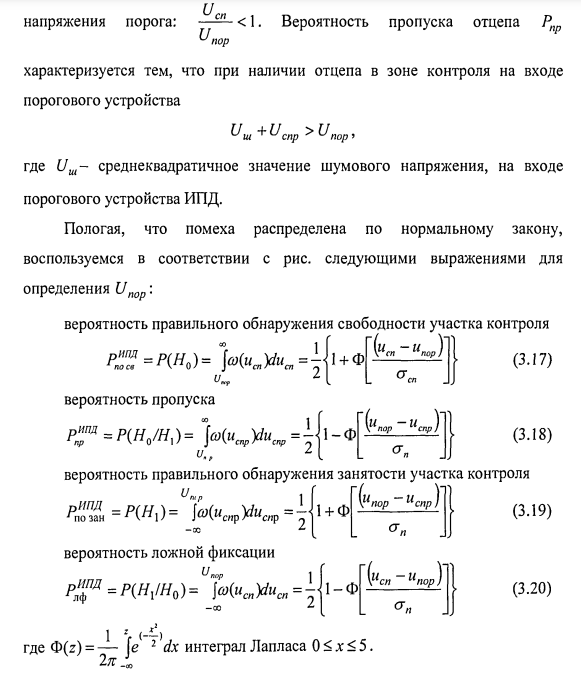
При выборе порогового напряжения ИПД будем руководствоваться соображениями, приведенными выше. В частности, вероятность ложной фиксации Рлф характеризуется тем, что при отсутствии отцепа в зоне контроля напряжение Vсп на входе порогового элемента оказывается меньше напряжения порога:








В таблице 3.1 приведены характеристики достоверности для различных признаков и критериев обнаружения. В скобках показаны значения соответствующие математическому ожиданию, остальные рассчитаны для дисперсии параметров.
На рис. 3.4-3.7 приведены расчетных характеристики достоверности ИПД для реальных соотношениях сигнал-шум при изменении порога обнаружения в соответствии с критериями обнаружения по различным признакам.
Для автономного обнаружителя риск ошибок связанных с пропуском и ложной фиксацией объекта приводит к одинаково опасным последствиям связанных с боем и сходом вагонов, поэтому предпочтение при выборе порогового уровня следует отдавать критериям оптимального наблюдателя и двухпороговому.
При использовании комплексированного обнаружителя выбор порогового уровня для датчиков входящих в его состав должен производится по критерию Неймана-Пирсона.
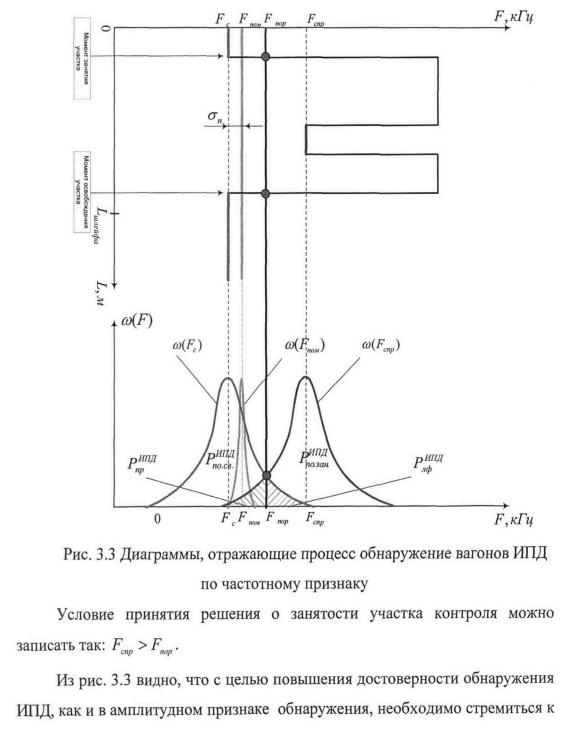
Амплитудный признак обнаружения вагонов в ИПД не позволяет добиться требуемых характеристик достоверности ввиду низкой помехозащищенности, сильной зависимости уровня полезного сигнала и просачивания от факторов климатического и эксплуатационного характера, а также зависимости уровня порога от нестабильности источника питания. Поэтому, частотный признак в ИПД является определяющим в задачах обнаружения вагонов в стрелочных зонах.





Таким образом, на основании вышесказанного можно сделать вывод, что факторами, определяющими достоверность обнаружения вагонов с использованием ИПД, являются:
- Координаты размещения индуктивного шлейфа на стрелочном участке;
- Соответствующая юстировка автогенератора для обеспечения требуемого уровня полезного сигнала и сигнала просачивания;
- Пороговый уровень напряжения узла принятия решения.
Алгоритмы принятия решения занятости участка комплексированными датчиками
В общем случае комплексирование датчиков защиты стрелок от перевода под вагонами может быть реализовано схемой, представляющей п- канальный обнаружитель (рис.3.8).



Датчик ИПД в такой схеме контролирует предстрелочный участок с помощью индуктивного шлейфа в форме прямоугольника. В качестве вспомогательного средства защиты на централизованных горочных стрелках могут рассматриваться точечные датчики индуктивного действия (УСО) со схемами логической обработки принятия решения.





Структура регистрации сигнала обнаружения и принятия решения, как видно, позволяет при объединении разного числа каналов обнаружителей и их сочетания обеспечить требуемые вероятности пропуска и ложной тревоги. При этом оптимизируется общая вероятность ошибки обнаружения, кроме того, комплексированный обнаружитель позволяет обеспечить парирование опасных отказов одного или нескольких каналов обнаружения датчиков и тем самым повысить безопасность роспуска отцепов на сортировочных горках.
ГРЦ в качестве датчика защиты не позволяет обеспечивать возрастающие требования к безопасности роспуска с одной стороны, а с другой — добиться сокращения эксплуатационных расходов, кроме того, датчики этого типа не обладают функциями диагностики работоспособности. Поэтому в дальнейшем, в соответствии с требованием ЭТТ, должен происходить отказ от датчиков такого типа и переход к средствам контроля без изолирующих стыков.
С другой стороны, использование трех (четырех) исполнительных реле, по одному на каждый тип датчика, также представляется нерациональным.
Базовыми типами датчиков защиты централизованных горочных стрелок следует считать датчики, работающие на различных физических принципах, обеспечивающие контроль занятости стрелочного участка на всей его длине вне зависимости от состояния балласта и рельсовых нитей в любых погодных условиях и позволяющие контролировать работоспособность вне зависимости от наличия отцепа в зоне контроля. Условием, существенно повышающим достоверность обнаружения подвижных единиц, является использование датчиков с различными признаками обнаружения (амплитудный, частотный, фазовый и др.).
Не снижая требований к безопасности проезда вагонов через централизованные горочные стрелки, схема комплексированной защиты может быть упрощена (рис. 3.11). При этом обработка информационного сигнала ведется по трем каналам обнаружения: в РТД-С1 по двум каналам и амплитудному признаку, а в ИПД по одному каналу и частотному признаку обнаружения. Зона контроля ИПД в этом случае включает предстрелочный участок и остряки стрелки с использованием шлейфа со скрещиванием.

Таким образом, достоверность обнаружения отцепов определяется вероятностью пропуска и ложной фиксации по каждому каналу обнаружения с перекрывающимися зонами контроля РТД-С1 и ИПД, различными признаками обнаружения и физическими принципами действия датчиков.
Возникновение нештатных ситуаций в процессе роспуска вагонов практически всегда приводит к опасным ситуациям, поскольку остановить свободно скатывающийся отцеп с вершины горки и тем самым предотвратить опасную ситуацию, как правило, невозможно. Предотвращение подавляющего большинства внезапных отказов технических средств предполагает многовариантные решения в зависимости от уровня избыточности информационной составляющей, контролирующей тот или иной датчик.
В связи с тем, что определяющей величиной для оценки правильного обнаружения в каналах используемых датчиков является напряжение сигнала или частота на входе порогового элемента, то этот параметр и должен контролироваться на предмет оценки возможного перехода устройства в опасное состояние. Элементом такого контроля может служить встроенная либо внешняя диагностика датчиков. При отсутствии средств диагностики контроль напряжения датчиков должен производиться механиком в соответствии с регламентом технического обслуживания. В этом случае обязательной является регистрация измеренных параметров с последующим анализом данных в сопоставлении с нормативными параметрами.
Современные управляющие вычислительные комплексы (УВК) систем автоматизации сортировочных процессов позволяют реализовать функции сбора информации о функционировании технических средств, анализа ее и прогнозирования предотказных ситуаций, то есть осуществить объективное диагностирование. Полный охват средствами дистанционной диагностики технических средств позволяет перейти к эффективным методам технического обслуживания устройств, существенному уменьшению влияния человеческого фактора.
На системном уровне автоматизации технологических процессов роспуска вагонов предусматривается также еще один контур обеспечения безопасности роспуска на алгоритмическом уровне. Он реализует реконфигурированные алгоритмы управления в случае возникновения нештатных ситуаций в процессе роспуска. Такие алгоритмы базируются на реализации информационной избыточности и позволяют парировать опасные последствия рисков аварийных ситуаций.
Характеристики достоверности обнаружения подвижных единиц комплексированными датчиками
Комплексирование датчиков обнаружения подвижных единиц является средством повышения достоверности работы обнаружителей и, как следствие, повышения безопасности проезда централизованных стрелок. Причем критерием целесообразности комплексирования в любых вариантах построения обнаружителей должна служить вероятность принятия ошибочного решения.
Рассмотрим принцип совмещения функция обнаружения отцепов на базе радиотехнического датчика РТД-С1 и индуктивно-проводного датчика ИПД. РТД-С1 и ИПД реализуют амплитудный признак обнаружения по снижению величины напряжения ниже порогового значения. Причем датчик РТД-С1 предполагает работу при полностью известных сигналах. В случае однородной конструкции вагонов и незначительного удаления ферромагнитной массы характеристики обнаружения могут быть обеспечены на достаточно высоком уровне. Приемник ИПД работает в условиях сильно флуктуирующего сигнала на входе, что обусловлено различным удалением ферромагнитной массы вагонов относительно чувствительного элемента датчика. В результате вероятностные характеристики, обнаружения приемником ИПД оказываются хуже, чем у РТД-С1. Совместная работа этих датчиков позволяет улучшить количественные показатели такой важной характеристики как вероятность пропуска отцепов, поскольку в этом случае реализуются различные физические принципы действия и компенсируются недостатки каждого в отдельности.

Использование дополнительного признака обнаружения отцепа в ИПД (выделение частоты гармонического сигнала автогенератора) позволяет повысить достоверность обнаружения движущихся отцепов. Отличительной особенностью построения ИПД, осуществляющего обнаружение подвижных единиц по изменению или отсутствию частоты гармонического сигнала, является реализация частного признака обнаружения по превышению частоты сигнала порогового значения. Таким образом, комплектованный обнаружитель на базе РТД-С 1 и ИПД может строиться по схеме
трехканального варианта: первые два канала решают задачу обнаружения по амплитудному признаку (РТД-С1), а третий — по частотному (ИПД).
Так как на сегодняшний день базовым устройством защиты горочных стрелок все еще остаются рельсовые цепи (ГРЦ), то четырехканальный вариант обнаружителя строится по схеме РТД-С1+ИПД+ГРЦ, хотя в этом случае отсутствует диагностика ГРЦ. Для достижения более высокой достоверности обнаружения могут использоваться точечные датчики индуктивного действия (УСО), реализующие амплитудный признак обнаружения и позволяющие определять направление движения отцепов. В этом случае структура узла принятия решения имеет четыре канала обнаружения (РТД-С1+ИПД+УСО), благодаря чему достигаются высокие характеристики достоверности, кроме этого реализуется функция выявления предотказных состояний каждого из комплексируемых датчиков.
В соответствии с выражением 3.5 суммарная вероятность ошибки комплексированного обнаружителя РТД-С1+ИПД с объединением каналов обнаружения по схеме «И» будет записываться:

Техническая реализация комплексироваиной защиты централизованных горочных стрелок
Опыт эксплуатации современных устройств автоматизации с использованием микропроцессорной техники свидетельствует о том, что безопасность роспуска может быть повышена за счет введения диагностических функций в напольных устройствах. Принимая во внимание ответственность решаемой задачи защиты централизованных горочных стрелок от несанкционированного перевода, эта функция очень актуальна на сегодняшний день.
С позиции комплексирования, использование следующих типов датчиков: механоконтактного (ГРЦ), точечных индуктивного действия (ПБМ-56, ДМ-88, ДП-50-80) и, как их дополнения, пространственного датчика светового действия (ФЭУ), представляется малоэффективным, поскольку ни один из них не обеспечивает контроль работоспособности и надежный контроль прохода длиннобазных вагонов.
В настоящее время для комплексированной защиты стрелок рекомендуется использовать радиотехнический (РТД-С) и индуктивно- проводной (ИПД) датчики, реализующие различные физические принципы действия, обладающие функциями дистанционной диагностики и способностью достоверно и надежно обнаруживать все типы вагонов, распускаемых с сортировочной горки.
В качестве вспомогательного средства защиты на централизованных горочных стрелках могут рассматриваться точечные датчики индуктивного действия (УСО) со схемами логической обработки принятия решения.
Прогнозирование предотказных состояний датчиков контроля стрелочного участка позволит предупреждать возможные внезапные отказы устройств. Дистанционный контроль работоспособности устройств с функцией прогнозирования позволит своевременно выявлять и устранять такие распространенные неисправности, как постепенный уход рабочих параметров датчиков вследствие влияния на них факторов эксплуатационного характера. В частности, к таким факторам относятся нарушение пространственной юстировки модулей РТД-С 1, нарушение режима настройки модуля ИПД или снижение чувствительности приемников РТД-С 1 и ИПД.
Следует заметить, что возникновение внезапных отказов чаще всего происходит вследствие постепенного развития отдельных неисправностей, которые в процессе эксплуатации не отслеживаются. Методы регламентного обслуживания напольных датчиков обнаружения, даже при всей пунктуальности их проведения, не всегда позволяют предупредить отказы устройств. Очень часто и разработчиками не устанавливаются те контрольные точки в устройствах, которые наилучшим образом позволяют выявить начало развития отказов.
На рис. 3.12 показана структурная схема, поясняющая принцип комплексирования датчиков обнаружения РТД-С1 и ИПД, используемых для защиты стрелочных участков сортировочных горок. Рассматриваемый метод может быть реализован и для защиты других централизованных стрелок на станциях. С целью более эффективного и своевременного обслуживания напольных устройств в блоке комплексированной защиты стрелочного перевода (БКЗС) формируется канал передачи диагностируемой информации о работоспособности датчиков обнаружения, которая передается на горочный пост в систему диагностического контроля, либо на АРМ электромеханика. При этом обязательным условием обеспечения контроля состояния блока является передача диагностической информации о состоянии РТД-С 1 (контрольное значение напряжения) и ИПД (несущая частота колебаний в шлейфе). Эта информация используется для прогнозирования предотказных состояний устройств, уменьшая риск возникновения опасных внезапных отказов.
Блок БКЗС размещается в путевом ящике ТЯ-2 в непосредственном приближении к железнодорожному пути и должен обеспечивать решение двух задач:
- формирование команды управления стрелкой и передача ее на исполнительное реле на горочном посту на основе анализа и обработки информации о занятости-свободности стрелочного участка от всех датчиков обнаружения, в блоке совместного принятия решения БСПР.
- обработка информации о техническом состоянии каналов обнаружения датчиков и ее передача в УВК ГАЦ по последовательному каналу связи на базе CAN интерфейса (RS — 485) диагностической информации для прогнозирования предотказных состояний напольных датчиков.

В отличие от решения по комплексированию, используемого до настоящего времени, в новом решении объединенный сигнал контроля стрелочного участка формируется непосредственно в БКЗС, а результирующий сигнал их совместного обнаружения передается по типовому каналу на одно исполнительное реле (реле КЗС), расположенное в релейной на горочном посту. В качестве этого реле, условно названного КЗС, может использоваться одно из уже используемых исполнительных реле датчиков РТД-С1 или ИПД.
При такой реализации блока комплексирования типовые элементы связи датчиков с релейной поста ЭЦ сохраняются, но используется лишь один канал связи с исполнительным реле. В качестве этого реле может использоваться любое из существующих. Другой, освободившийся канал связи может использоваться для передачи на горочный пост диагностической информации о работе датчиков защиты.
Блок БКЗС предназначен для применения на механических и автоматизированных сортировочных горках при роспусках составов и совершения маневровых работ, является изделием непрерывного длительного применения, отказы которого приводят к последствиям катастрофического характера.
БКЗС работает в условиях электромагнитных помех, возникающих как в кабельной сети питания и информационных линий, так и в рельсовых цепях из-за сигнальных и тяговых токов, поэтому к нему предъявляются требования безопасности.
Безопасность изделия определяется его построением с использованием последовательного соединения элементов, отказы которых приводят к защитному отказу на выходе, и элементов, отказы которых приводят к изменению параметров в пределах, определенных критериями опасных отказов:
предотвращением опасностей, т. е. такой реализацией алгоритмов, которые исключают возникновение опасностей;
обнаружением и диагностированием таких состояний и режимов в работе изделия, которые могут способствовать возникновению опасностей;
— ограничением времени действия состояний и режимов в работе изделия, которые способствуют возникновению опасности, и устранение накопления на опасный отказ;
при обнаружении отказа аппаратных средств БКЗС должен перейти в пассивное состояние с выдачей сигнала занятости стрелочного участка.
Критериями опасного отказа БКЗС является:
искажение ответственной информации в изделии, которое не обнаруживается средствами защиты, и в результате которого управляющее устройство системы формируется сигнал свободности стрелочного участка;
самопроизвольная случайная генерация сигнала свободности стрелочного участка изделия.
На рис.3.13 представлена функциональная схема БКЗС. Изделие представляет собой блочную конструкцию, состоящую из двух основных частей:
- блок внешних соединений, содержащий элементы защиты по ЭМС, соединители для подключения внешних устройств питания, плавкие предохранители;
- основной корпус с объединительной платой и функциональными ячейками.
Состав функциональных ячеек: ячейка центрального обработчика (ЦО) содержит двухканальную схему обработки полученной от датчиков информации (состояние свободности/занятости стрелочного участка) и последовательный канал связи на базе CAN интерфейса;
- ячейка формирователя безопасного напряжения (ФБН) для управления исполнительным реле, содержащая схему сравнения, с целью осуществления перезапуска (аппаратного сброса) микроконтроллеров в случае неидентичности их решений;
- ячейка ЭМУ для работы с индуктивным шлейфом ИПД и частотным признаком обнаружения;
- ячейка модуля питания (МП) для преобразования переменного напряжения 220В в постоянное напряжение 24В.
Определение состояния занятости/свободности стрелочного участка
осуществляется по сигналам, поступающим от датчиков ИПД и РТД-С1, при этом для визуального контроля функционирования ячеек должны быть предусмотрены светодиодные индикаторы на передних панелях внутренних ячеек:
- режимы функционирования ячеек;
- наличие вторичного напряжения питания на ячейках;
- исправности блока.
К блоку БКЗС подключается датчик РТД-С1, шлейф ИПД. Ячейка электронного модуля ЭМУ, преобразующая несущую частоту колебаний в шлейфе ИПД, входит в состав блока БКЗС. Сигналы занятости/свободности контролируемого стрелочного участка, диагностическая информация от датчиков обнаружения ИПД, РТД-С1 поступает на вход центрального обработчика (ЦО), который содержит два независимых канала обработки полученной информации. При этом обнаружение занятости контрольного участка в ИПД ведется по одному каналу, а в РТД-С1 — по двум каналам обнаружения. Обработанная контроллерами 1 и 2 информация поступает на схему сравнения, и в случае не идентичности решений происходит перезапуск микроконтроллеров. Для управления исполнительным реле используется формирователь безопасного напряжения. Диагностическая информация состояния датчиков ИПД, РТД-С, ячейки микроконтроллеров передается по САЫ-интерфейсу на постовое оборудование. В составе блока БКЗС применяется электронная схема комплексирования сигналов свободности/занятости контролируемого стрелочного участка на базе сигналов обнаружения датчиков РТД-С, ИПД, используется двухканальная схема обработки входной информации. При этом происходит постоянный анализ функционирования датчиков ИПД, РТД-С и микроконтроллеров путем обработки диагностической информации на посту, что позволяет выявлять сбои в работе устройства БКЗС и своевременно провести ремонтно-восстановительные работы.

Выводы

Список литературы
- Попов В.П. Основы теории цепей. Уч. для вузов. — М.: Высшая школа, 1985.-496 с.
- Перов И.Н., Акинин М.Ю. Индуктивный шлейф как чувствительный элемент индуктивно-проводного датчика // Автоматика, связь, информатика. — 2005. — № 2. — С. 12 — 14
- Акинин М.Ю. Комплектование как метод повышения достоверности обнаружения транспортных средств // Безопасность движения поездов: Труды V Научно-практической конференции. — М.: МИИТ, 2004.-С. II-1
- Шелухин В.И., Акинин М.Ю. Достоверность обнаружения подвижных единиц комплексируемыми датчиками // Безопасность движения поездов: Труды V Научно-практической конференции. — М.: МИИТ, 2004. — С. II-41
- Шелухин В.И., Савицкий А.Г., Перов И.Н., Акинин М.Ю. Комплексирование как метод повышения безопасности проезда
централизованных стрелок на сортировочных станциях // Автоматика, связь, информатика. — 2006. — № 5. — С. 12-14 - Блок комплексированной защиты стрелочного перевода БКЗС. Техническое задание. 2005. — 10 с.
- Акинин М.Ю. Повышение безопасности функционирования технических средств на стрелочных участках // Безопасность движения поездов: Труды VI Научно-практической конференции. — М.: МИИТ, 2005.-С. 1-2
- Шелухин В.И., Савицкий А.Г., Акинин М.Ю. Дистанционная диагностика как средство повышения безопасности роспуска составов // Безопасность движения поездов: Труды VI Научно- практической конференции. -М.: МИИТ, 2005. — С. 1-55
- Протокол совещания №ЦШЦ-36 от 30 ноября 2005 г. — 4 с.
- Радиотехнические железнодорожные устройства./ В.В. Григорин- Рябов и др. — М.: Транспорт, 1986. -160с.