Цикл статей:
Глава 1 – Методы и алгоритмы диагностики неисправностей стрелок с электродвигателями переменного токаГлава 2 – Анализ неисправностей стрелок с электродвигателями переменного тока
Обоснование применения теории нейронных сетей в системе автоматизации диагностики стрелок с ЭД переменного тока
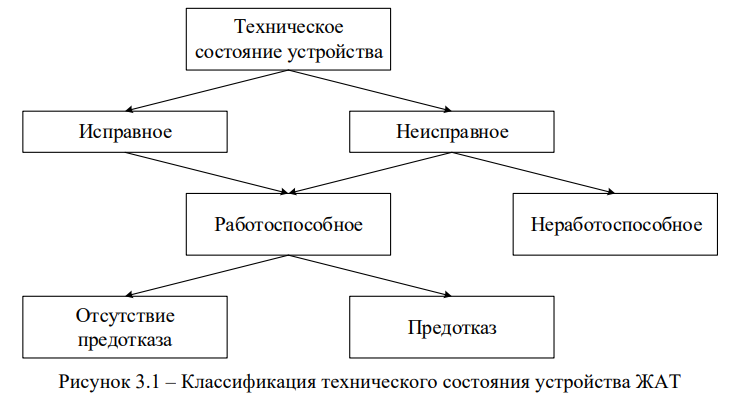
Техническое диагностирование — это определение технического состояния объекта [41]. Объект ЖАТ может находиться в одном из следующих состояний [42] (рисунок 3.1):
1) Исправное — это состояние объекта, при котором он соответствует всем требованиям, установленным в документации на него.
2) Неисправное — состояние объекта, при котором он не соответствует хотя бы одному из требований, установленных в документации на него.
3) Работоспособное — состояние объекта, в котором значения всех параметров, характеризующих способность выполнять заданные функции, соответствует требованиям, установленным в документации на этот объект.
4) Неработоспособное — состояние, в котором значение хотя бы одного из параметров, характеризующих способность выполнять заданные функции, не соответствует требованиям документации на этот объект.
5) Предотказное — состояние объекта, характеризуемое повышенным риском его отказа [12, 42]. Отказ — событие, заключающееся в нарушении работоспособного состояния объекта.
Автоматизированная диагностика неисправностей стрелок с ЭД переменного тока заключается в выявлении предотказного состояния и определении одного из нескольких неработоспособных состояний, в которых может находится устройство, т.е. в сопоставлении диагностических параметров, определенным классам, соответствующим описанным в разделе 2.1 неисправностям. Таким образом, задача диагностики стрелки с ЭД переменного тока может быть отнесена к задаче классификации с несколькими классами.
В общем виде методы классификации [43, 44] можно отнести к следующим видам:
- Метод линейного классификатора.
- Метод нелинейного классификатора.
- Метод построения деревьев решений.
Линейный классификатор [45] позволяет определить линейную разделяющую поверхность. В случае двух классов такой поверхностью является гиперплоскость, разделяющая пространство признаков на два полупространства. К линейным классификаторам относят метод опорных векторов, байесовский классификатор и другие методы.
В методе опорных векторов [40, 46, 47] для каждого состояния предлагается набор обучающих примеров, заданных как точки в многомерном пространстве. Эти точки образуют области в пространстве, соответствующие разным классам. Крайние точки класса называются опорными, а расстояние между двумя опорным точками является длиной опорного вектора. Требуется найти такую гиперплоскость, чтобы длина опорных векторов было максимальной. Для применения этого метода необходимо, чтобы классы были линейно-разделимы между собой. Недостатком метода является то, что он подходит для решения задачи классификации только с двумя линейно-разделимыми классами. Для решения задачи с большим числом классов применяется разбиение задачи на подзадачи классификации по схеме «один-против-остальных». При этом необходимо решить задачу объединения результатов.
Байесовский классификатор [48] — метод, основанный на теореме, утверждающей, что если плотности распределения каждого из классов известны, то искомый алгоритм можно выписать в явном аналитическом виде. Для каждого из классов определяются функции правдоподобия, по которым вычисляются апостериорные вероятности классов. Объект относится к тому классу, для которого апостериорная вероятность максимальна. Как правило, на практике плотности распределения классов неизвестны, и их приходится восстанавливать по обучающей выборке. Восстановление возможно только с некоторой погрешностью, и чем меньше обучающая выборка, тем выше вероятность появления эффекта переобучения, когда метод теряет свои обобщающие свойства и верно классифицирует только примеры из обучающей выборки. Также, эффективность метода резко падает при ошибке в гипотезах о плотности распределения классов.
Линейные классификаторы эффективны для задач классификации с двумя классами. Для решения задачи классификации в случае с многими классами рекомендуется применять нелинейные классификаторы [49], т.е. классификаторы, использующие для разделения классов нелинейную поверхность. Примером таких классификаторов является нейронная сеть.
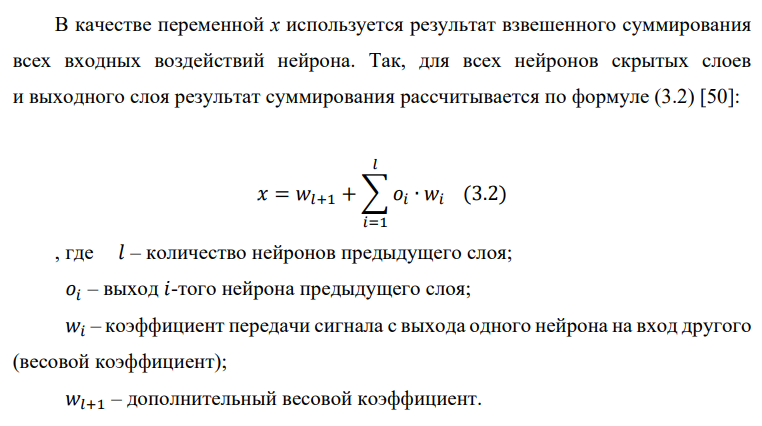
Нейронная сеть является распределенным параллельным процессором, состоящим из связанных между собой элементарных единиц обработки информации (нейронов), накапливающих экспериментальные знания для их последующей обработки [50]. Нейроны реализованы нелинейной функцией от одного аргумента — взвешенной суммы всех входных сигналов. Такая функция называется функцией активации. Совокупность связанных между собой нейронов определяет структуру сети и задачи, которые способна решать нейронная сеть. Весовые коэффициенты, характеризующие силу связи между двумя нейронами, называются синоптическими коэффициентами. Процесс подбора синоптических коэффициентов называется обучением сети [37]. В процессе обучения каждому классу сопоставляется массив входных значений (признаков класса). Нейронные сети способны обобщать информацию, полученную во время обучения. Также преимуществом использования нейронных сетей является отсутствие необходимости корректировки алгоритмов при изменении количества или признаков классов. Недостатком применения нейронных сетей может являться большая вычислительная сложность [50] при использовании сложных структур сети (например, свёрточных нейронных сетей [51, 52]).
Метод построения деревьев решений позволяет построить наглядный алгоритм классификации объекта. Дерево решений состоит из узлов (называемых также вершинами) и ветвей, соединяющими узлы. Самый первый узел называется корнем дерева, а крайние узлы — листьями. Каждой вершине сопоставляется некоторая характеристика, описывающая объект, а ветвям — области значения этой характеристики. Процедура построения дерева решений представляет собой итерационный процесс, в котором для очередной вершины дерева выбирается признак, наилучшим образом удовлетворяющий некоторому критерию ветвления [53]. Критерий ветвления выбирается в зависимости от используемого алгоритма. Популярными алгоритмами для построения дерева решений являются ID3 [54] (или его усовершенствованная версия C4.5 [55]) и алгоритм CART [56]. Различие между этими алгоритмами состоит в способе выбора признака ветвления. Преимуществом деревьев решений является наглядность получаемой модели и простота её интерпретации человеком. Недостатком метода является проблема переобучения, т.е. возможность построения чрезмерно большого дерева, которое будет недостаточно полно представлять данные. Также существует необходимость построения дерева с нуля (т.е. полного изменения алгоритма диагностики) при изменении количества классов и описания входных данных.
Для выбора метода классификации в задаче диагностики стрелок с ЭД переменного тока следует учитывать следующие особенности этой задачи:
- Наличие более двух классов технического состояния стрелки.
- Отсутствие линейной разделимости классов технического состояния стрелки по причине пересечения диапазонов ДК, в которых расположены примеры различных классов.
- Отсутствие необходимости в интерпретации модели, полученной с помощью выбранного метода классификации.
- Возможность одновременного проявления на графике признаков более одной неисправности.
Применение теории нейронной сети при построении методов и алгоритмов диагностики неисправностей стрелок с ЭД переменного тока, позволяет учесть описанные выше особенности. Нейронные сети обеспечивают многоклассовую классификацию вне зависимости от линейной разделимости классов. Кроме того, нейронные сети способны определить наличие у анализируемого примера признаков нескольких классов. Эффективность применения нейронных сетей для классифицирования технического состояния стрелок с ЭД постоянного тока показана в [34, 38]. Поэтому принято решение применить теорию нейронных сетей для разработки методов и алгоритмов диагностики неисправностей стрелок с ЭД переменного тока.
Разработка и анализ методов нормализации значений на входе нейронной сети. Выбор топологии нейронной сети
Для применения теории нейронных сетей к задаче классификации технического состояния стрелки необходимо выбрать топологию нейронной сети, которая позволит решить поставленную задачу. Топология нейронной сети описывает взаимные связи между нейронами сети и определяет поведение всей сети. Для задачи классификации применяются нейронные сети прямого распространения с одним или с несколькими скрытыми слоями. К таким сетям относятся, например, многослойный персептрон и свёрточные нейронные сети. В текущей работе в качестве топологии сети был выбран многослойный персептрон. В отличие от свёрточных нейронных сетей такая структура требует меньше вычислительных затрат как на этапе обучения сети, так и на этапе распознавания. Кроме того, сложная топология свёрточных нейронных сетей не является необходимой для задачи диагностики стрелок, так как эксперименты показали, что для этой задачи достаточно применения топологии «однослойный персептрон» [34,37]. Применение нескольких скрытых слоев позволяет сократить общее количество нейронов в скрытых слоях по сравнению с количеством нейронов в скрытом слое однослойного персептрона без потери обобщающей способности и качества распознавания сети.
В предыдущих разделах для диагностирования состояния стрелки
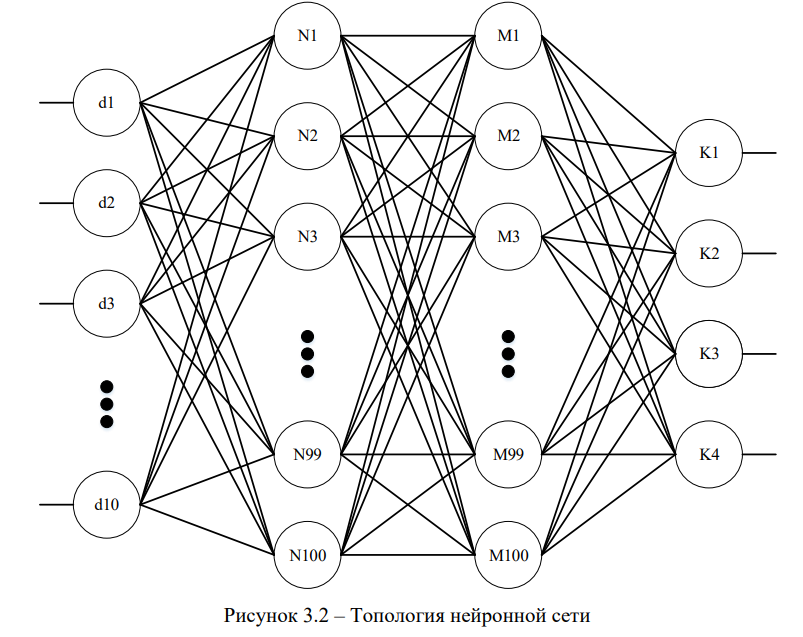
с ЭД переменного тока предложено использовать ДК [Приложение Г]. Для анализа ДК перевода нейронной сетью требуется подать массив значений этих критериев ДК на вход нейронной сети. При этом каждому элементу массива ДКi будет однозначно соответствовать нейрон входного слоя сети {d1, d2, …, d10}.
Для анализа и классификации с помощью нейронной сети были выбраны такие технические состояния стрелки с ЭД переменного тока, как неисправности Н1, Н2, Н5 и исправное состояние. Диагностирование остальных неисправностей (Н3, Н4, Н6, Н7) реализовано с помощью методов логического анализа функции мощности перевода для снижения величины ошибки распознавания. Каждое анализируемое состояние является отдельным классом Кi и каждому классу соответствует свой выходной нейрон сети.
В [34] С.В. Бочкарев предлагает использовать нейронную сеть прямого
распространения с одним скрытым слоем, состоящим из 10 нейронов.
Эта структура оказалась неподходящей для анализа возросшего числа
диагностических критериев, т.к. обученная сеть показывает низкую точность распознавания на тестовой выборке. Экспериментальным путём была определена топология сети для анализа перечисленных выше критериев – нейронная сеть прямого распространения с двумя скрытыми слоями, каждый из которых содержит 100 нейронов {N1, N2, …, N100} и {M1, M2, …, M100}. Полученная топология сети приведена на рисунке 3.2.

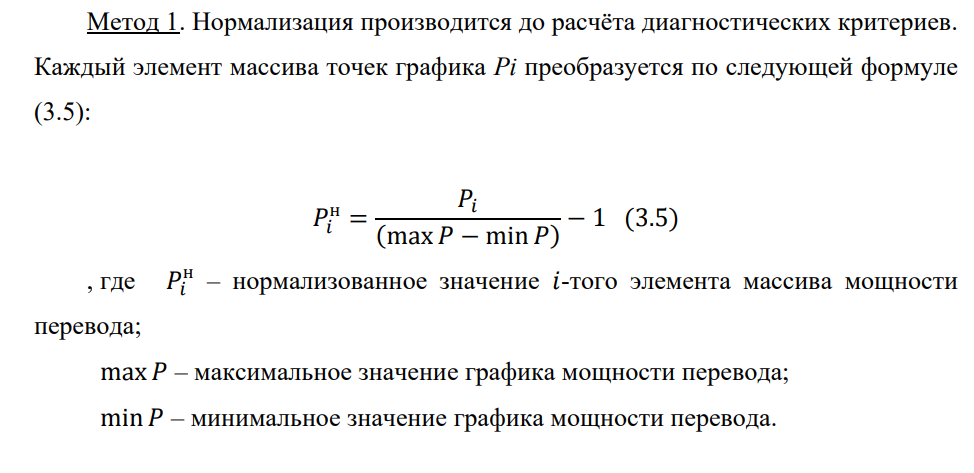
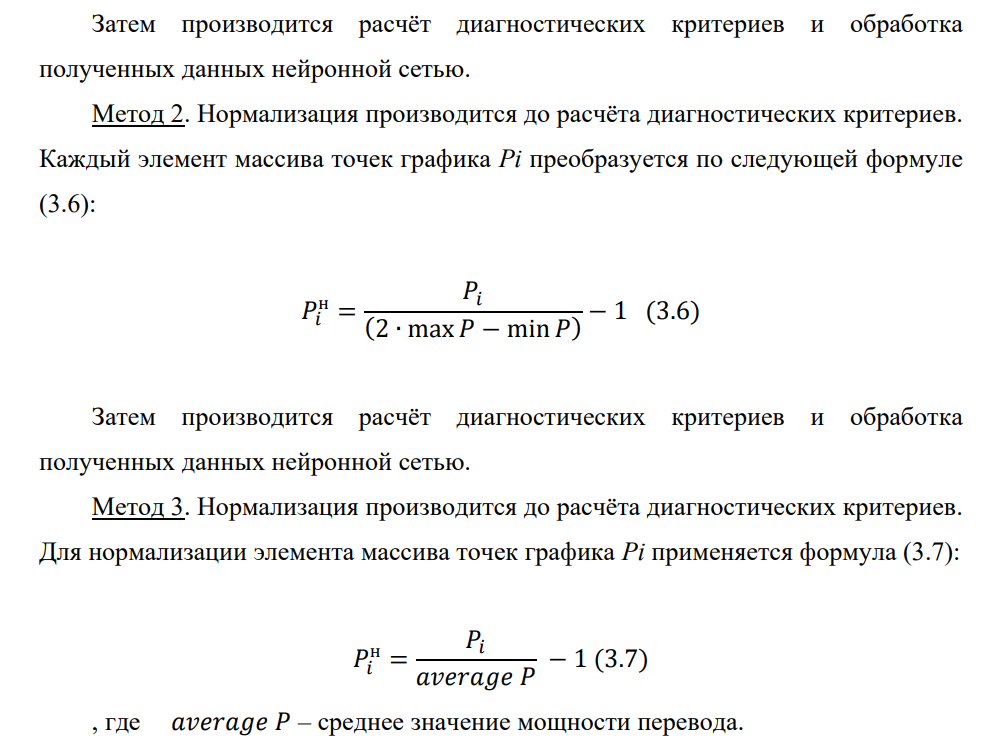
Недостатком метода 1 является то, что среднее значение по всему обучающему множеству не является близким к нулю, из-за того, что максимальное значение мощности перевода max Р превышает среднее значение более чем в два раза. Для устранения этого недостатка был разработан метод 2, и в формулу был добавлен поправочный коэффициент, смещающий среднее значение по всему обучающему множеству к нулю.
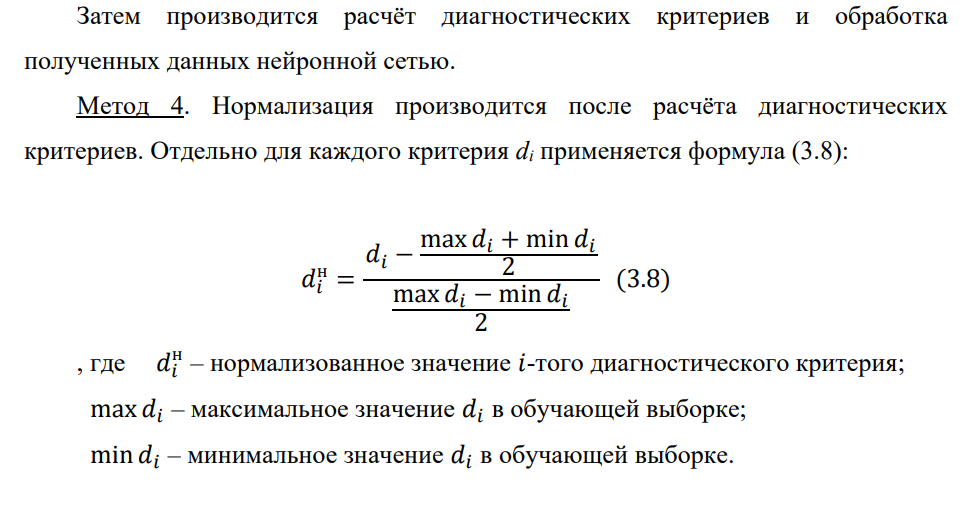
Все методы нормализации были проверены опытным путём. Наибольшую ошибку обучения показал метод 3, т.к. критерий среднего значения в рабочей зоне перестал быть различающим для диагностируемых неисправностей. Наименьшую величину ошибки распознавания тестовой выборки и наибольшую скорость обучения показал четвертый метода нормализации. Поэтому принято решение использовать формулу (3.8) для нормализации входных значений нейронной сети.
Алгоритмы обучения нейронной сети
Для того, чтобы с помощью нейронной сети можно было решить задачу классификации, сеть необходимо обучить примерам различных классов. В обучающую выборку необходимо включать примеры, которые в полной мере описывают класс. В практических задачах для достижения наиболее полного описания возможных классов в обучающей выборке необходимо собрать достаточное количество примеров, расположенных в разных частях соответствующей классу области в пространстве ДК.
Для решения задачи обучения нейронной сети существует множество алгоритмов [58]. Для обучения нейронных сетей, спроектированных для решения задачи классификации, применяют обучение с учителем [37]. Наиболее популярным алгоритмом обучения с учителем является алгоритм обратного распространения ошибки (BackPropaganation) [59-61], основанный на методе градиентного спуска по гиперплоскости функции ошибки, и его модифицированная версия RProp [62], которая является одним из лучших [63] алгоритмов обучения первого порядка. Эффективность применения алгоритма обучения ЯРгор доказана в том числе для задач железнодорожной автоматики и телемеханики [34, 37, 51].
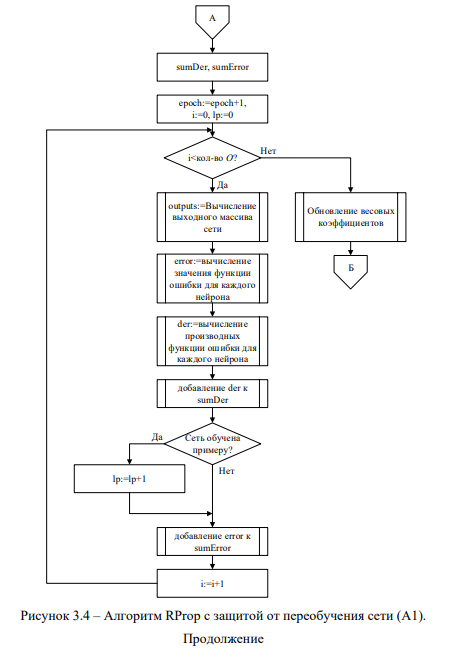
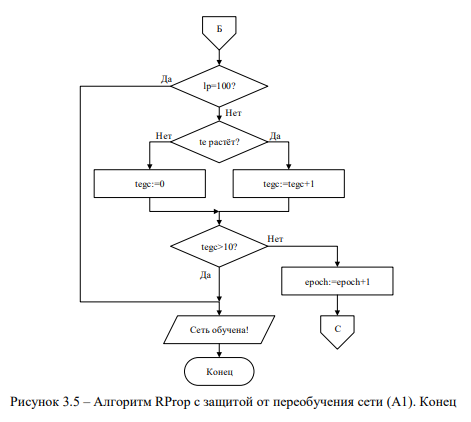
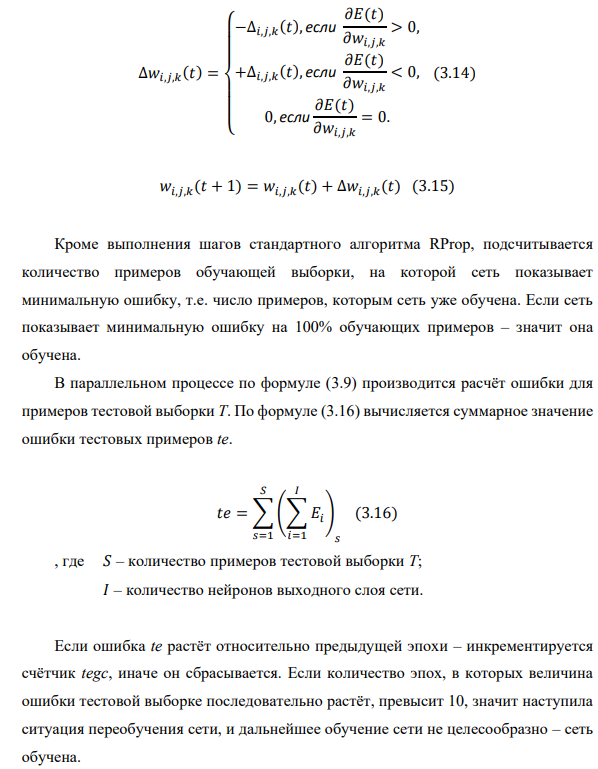
Одним из недостатков применения нейронных сетей является ситуация переобучения сети. Переобучение нейронной сети — это ситуация, при которой модель, построенная на основе нейронной сети, показывает низкий процент ошибки на обучающей выборке и высокий процент ошибки в условиях реальной эксплуатации, т.е. сеть в процессе обучения запоминает только примеры из обучающей выборки, теряя свои обобщающие свойства. Для защиты сети от потери обобщающих свойств необходимо останавливать обучение сети при появлении признаков переобучения. Модифицированный алгоритм обучения RРгор с встроенной защитой от переобучения сети (А1) представлен на рисунках 3.3-3.5.
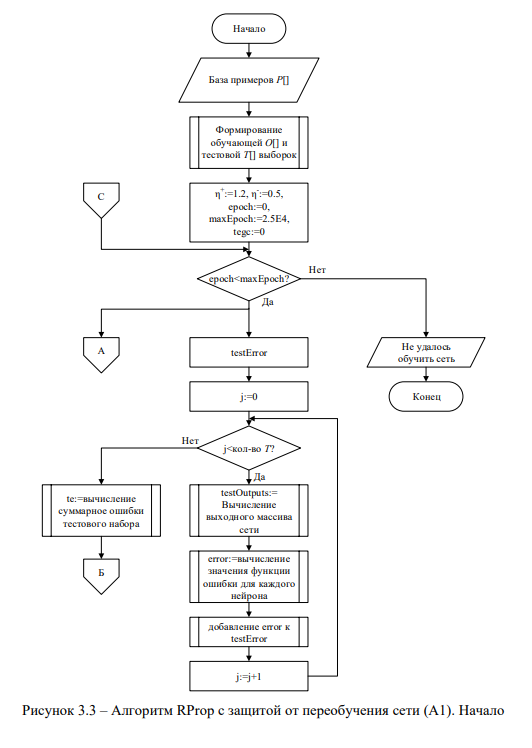
Работа над обучением сети производится в цикле, где каждый шаг цикла называется эпохой. В течение одной эпохи параллельно выполняются два процесса — собственно процесс обучения сети, и процесс проверки сети на тестовой выборке.
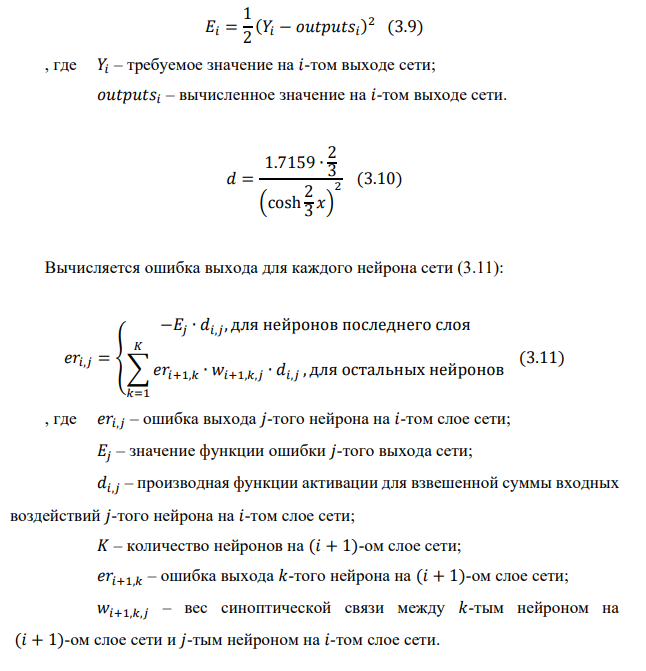
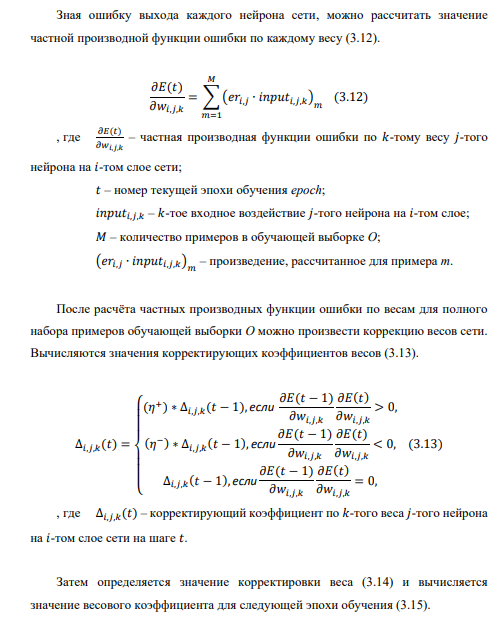
Обучение сети производится по обучающей выборке O. Для каждого примера выборки выполняются несколько последовательных шагов, идентичных стандартному алгоритму RProp [62]. Сначала вычисляются выходные значения нейронной сети outputs, и рассчитывается значение функции ошибки E для каждого выхода сети (3.9). Затем рассчитывается производная функции активации d для каждого входного воздействия x нейрона по формуле (3.10).
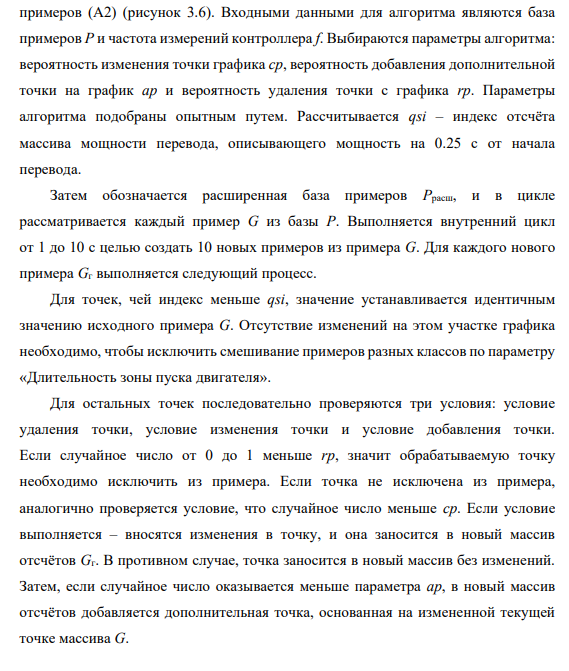
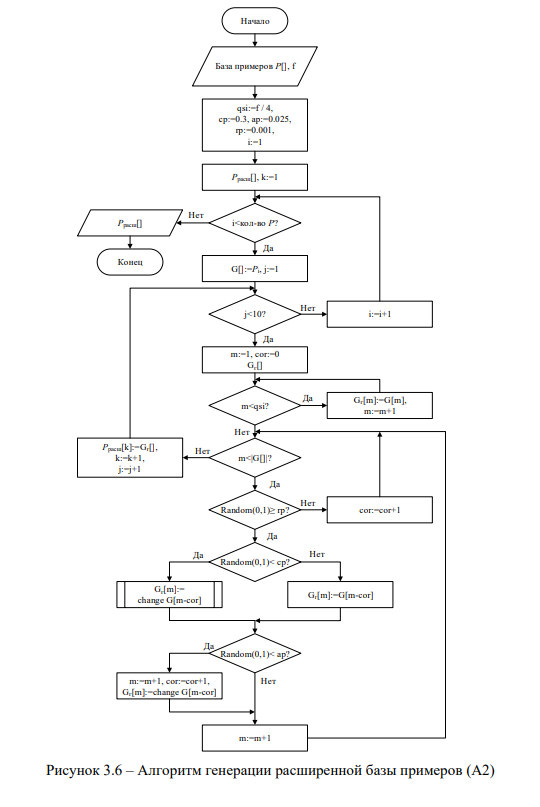
Для расширения обучающей базы примеров с целью ускорения процесса обучения нейронной сети был разработан алгоритм генерации расширенной базы
Выводы
- Задача определения технического состояния стрелки с ЭД переменного тока является задачей классификации с несколькими классами. В главе рассмотрены различные методы классификации. С учётом особенностей задачи принято решение применить теорию нейронных сетей для разработки методов и алгоритмов диагностики неисправностей стрелок с ЭД переменного тока.
- Выбрана топология нейронной сети, обеспечивающая качественное диагностирование неисправностей стрелок с ЭД переменного тока: персептрон с двумя скрытыми слоями. Структура, предложенная в [34] не подходит для анализа возросшего числа диагностических критериев, т.к. обученная сеть показывает низкую точность распознавания на тестовой выборке. Поэтому топология была расширена на дополнительный скрытый слой, увеличено число нейронов скрытого слоя. Применение гиперболического тангенса в качестве функции активации нейрона позволило ускорить обучение сети.
- Выбран метод нормализации входных значений нейронов, обеспечивающий увеличение скорости обучения сети (формула 3.8).
- Алгоритм обучения сети доработан для защиты от ситуации «переобучения» нейронной сети (алгоритм А1).
- Разработан алгоритм генерации расширенной базы примеров (алгоритм А2), добавляющий в обучающую выборку зашумленность, необходимую для повышения сходимости алгоритмов обучения сети.
- Тестирование нейросетевой модели диагностики стрелок с ЭД переменного тока ко всем рассматриваемым неисправностям показало нестабильные результаты диагностирования. Процент верно распознанных графиков составлял менее 90% от всех графиков тестовой выборки. Определена причина снижения качества диагностирования: классы, описывающие неисправности Н3-Н7, расположены в пересекающихся областях пространства диагностических критериев, что затрудняет их разделение. Для повышения качества диагностики стрелок с ЭД переменного тока принято решение разработать методы логического анализа функции мощности перевода для определения неисправностей Н3, Н4, Н6, Н7.
Список литературы
- Silmon J. A. Improving railway switch system reliability with innovative condition monitoring algorithms [Текст] / J. A. Silmon, C. Roberts // Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit. — 2010. — Т. 224. — №. 4. — С. 293-302.
- Wang S. M. Fault diagnosis for railway switch control circuit based on ARPSO least squares support vector machine [Текст] / S. M. Wang, Y. LEI // Journal of Lanzhou Jiaotong University. — 2010. — Т. 29. — №. 4. — С. 1-5.
- Tao H. Intelligent fault prediction of railway switch based on improved least squares support vector machine [Текст] / H. Tao, Y. Zhao // Metallurgical and Mining Industry. — 2015. — Т. 7. — №. 10. — С. 69-75.
- HONGZHI S. U. K. C. H. O. Use Artificial intelligence to diagnose the fault of speediness railway switch [Текст] / S. U. K. C. H. O. HONGZHI //Microcomputer Information. — 2007. — Т. 22. — С. 081.
- Böhm T. Accuracy improvement of condition diagnosis of railway switches via external data integration [Текст] / T. Böhm // Proceedings of 6th European Workshop on Structural Health Monitoring. — 2012. — Т. 16. — №. 9.
- Бочкарев С.В. Методы диагностирования и прогнозирования технического состояния стрелочного переводного устройства [Текст]: автореферат. / Бочкарев С.В. // СПб.: ФГБОУ ВО ПГУПС, 2014. — 15 с.
- Белоусов С. В. Проявление неисправностей стрелочных переводных устройств с электродвигателями переменного тока на графике мощности перевода [Текст] / С. В. Белоусов // Автоматика на транспорте. — 2018. — Т.4 — № 4.
- Инструкция по технической эксплуатации устройств и систем сигнализации, централизации и блокировки (СЦБ) ЦШ-720-09 [Текст] // М., ОАО «РЖД», 2009.
- Белоусов С. В. Исследование методов анализа диагностической информации для выявления неисправностей стрелочного электропривода [Текст] / Д. В. Зуев, С. В. Бочкарев, С. В. Белоусов, М. К. Селезнёва // Транспортные интеллектуальные системы: сборник материалов I международной научно- практической конференции «Транспортные интеллектуальные системы — 2017» (TIS-2017), Санкт-Петербург, 16-17 февраля 2017 г.; под. ред. Вал. В. Сапожникова, Д.В. Ефанова. — СПб: ФГБОУ ВО ПГУПС. — 2017. — С. 101-109.
- Белоусов С. В. Обработка нейронной сетью графика тока перевода стрелочного переводного устройства с электродвигателем постоянного тока [Текст] / С. В. Белоусов // Информационные технологии на транспорте: сборник материалов секции «Информационные технологии на транспорте» Юбилейной XV Санкт-Петербургской международной конференции «Региональная информатика — 2016», Санкт-Петербург, 26-28 октября 2016 г.; под. ред. Вал. В. Сапожникова. — СПб: ФГБОУ ВО ПГУПС. — 2016. — С. 67-71. — ISBN 978-5-7641-0951-0.
- Воронцов К. В. Лекции по методу опорных векторов [Текст] / К. В. Воронцов // ВЦ РАН, М. — 2007. — 18 с.
- Кореневский Н. А. Проектирование систем принятия решений на нечетких сетевых моделях в задачах медицинской диагностики и прогнозирования [Текст] / Н. А. Кореневский // Вестник новых медицинских технологий. — 2006. — №. 2. — с. 6-9.
- ГОСТ 20911-89. Техническая диагностика. Термины и определения [Текст]. — М.: Стандартинформ. — 2009.
- ГОСТ 27.002-15. Межгосударственный стандарт. Надежность в технике. Термины и определения [Текст]. — Официальное издание. Надежность в технике: Сб. ГОСТов. — М.: ИПК Издательство стандартов. — 2002.