Цикл статей:
Глава 1 – Устройства обеспечения безопасности движения поездов по железнодорожным стрелкамГлава 2 – Анализ структуры и режимов работы стрелочных переводных устройств(СПУ)
Глава 3 – Синтез СПУ нового поколения
Глава 4 –Совершенствование элементов СПУ
Отечественные СПУ и эксплуатационно-технические требования
На Российских железных дорогах повсеместное распространение по¬лучили два типа стрелочных переводных устройства.
Первое состоит из:
• СЭП невзрезного типа СП-6М;
• гарнитуры для установки привода на стрелочном переводе;
• гарнитуры для соединения привода с остряками. Второе состоит из:
• СЭП невзрезного типа СП-12У;
• внешнего замыкателя типа ВЗ-7 (ранее ВЗ-2, ВЗ-5);
• гарнитуры для установки привода на стрелочном переводе;
• гарнитуры для соединения привода с остряками (или ПСК) и внешним замыкателем.
Одно и второе СПУ предназначено для:
• перевода остряков (и ПСК) стрелки;
• запирания остряков стрелки (и ПСК) в крайних положениях;
• непрерывной передачи по электрической цепи на пост ЭЦ досто¬верной информации (контроля) о положении остряков (и ПСК) относительно рамных рельсов.
Управление СПУ происходит с поста ЭЦ по кабелю с использованием электрических схем управления, в основном, двух типов:
- двухпроводной схемы управления и контроля СЭП с электродвигателем по-стоянного тока,
- пятипроводной схемы управления и контроля СЭП с электродвигателем пе-ременного трехфазного тока.
В соответствии с требованиями Правил технической эксплуатации железных дорог Российской Федерации (6) СПУ должны обеспечивать: - плотное прилегание прижатого остряка к рамному рельсу (ПСК к усовику) при крайних положениях стрелки;
- не замыкание стрелки при зазоре 4 мм и более между прижатым остряком и рамным рельсом;
- отвод остряка от рамного рельса на расстояние не менее 125 мм;
- механическое запирание остряков для предотвращения их отхода от крайнего положения при походе поезда;
- ручной (рукояткой) перевод стрелки.
Кроме этого схема управления электроприводом, которая является частью устройств ЭЦ, должна обеспечивать: контроль взреза стрелки, кон¬троль положения стрелки на пульте дежурного по станции, перевод стрелки автоматически при задании маршрута и стрелочным коммутатором или кнопкой. Перевод стрелки может быть возможен только при отсутствии по¬езда на этом стрелочно-путевом участке (контакт путевого реле СП) и уча¬стия стрелки в другом маршруте (контакт реле 3).
Функциональная и установочная схемы стрелочного переводного устройства
СПУ выполняет четыре основных функции:
-перевода (рабочий режим работы), при котором СЭП перемещает остряки с нормированным усилием;
-контроля и запирания (контрольный режим), когда осуществлено механическое запирание остряков в крайнем положении с усилием, исклю¬чающим их отход при прохождении поезда, и имеется электрический кон¬троль плотности прилегания остряка к рамному рельсу;
-защищенности от силового воздействия (динамический режим), ко¬гда СЭП и его гарнитура воспринимают динамическое воздействие от колес подвижного состава, при этом не нарушается нормальная работа СПУ;
-защиты от ложного контроля при взрезе (аварийный режим) стрелки подвижным составом, в результате которого происходят поломка и остаточ¬ные деформации элементов СПУ, при этом исключается контрольный и ра¬бочий режим.
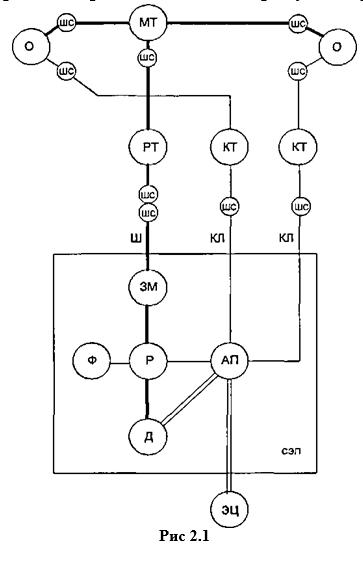
Для обеспечения указанных режимов СПУ имеет функциональную схему, представленную на рис.2.1. СПУ включает:
- СЭП в составе:
-реверсивного электродвигателя (Д);
-редуктора (Р), который преобразует вращательное движение вала электродвигателя в линейное перемещение шибера;
-фрикционного механизма (Ф), который ограничивает усилие на ши¬бере при переводе остряков стрелки;
-запирающего механизма (ЗМ), который удерживает шибер от обрат¬ного перемещения в конце его нормированного хода;
-контрольного механизма или автопереключателя (АП), который кон-тролирует крайнее запертое и среднее незапертое положение остряков (О), предает эту информацию по электрической цепи на пост ЭЦ; -шибера (Ш), который перемещает и запирает остряки; -контрольных линеек (КЛ), которые контролируют синхронное пере¬мещение остряков на заданное шибером расстояние. - Гарнитуру соединительную в составе:
-рабочей тяги (РТ) с шарнирными соединениями (ШС); -контрольных тяг (КТ) с ШС; -межостряковой тяти ( МТ) с ШС; -серег остряков (О) с ШС.
На рисунке 2.1 двойными линиями обозначены электрические, а одинарными — механические связи элементов СЭП и гарнитуры.
Контрольный механизм является наиболее ответственным узлом СЭП и представляет собой электромеханический компаратор, где в конце перевода стрелки проверяются следующие условия:
- шибер выбрал свой нормативный ход и заперт;
- контрольные линейки одновременно с шибером и остряками стрел¬ки переместились на требуемое расстояние.
Только при совпадении этих двух событий замыкаются контрольные контакты АП, фиксируя нормальный перевод.
Для реализации указанных функций СПУ имеет установочную схему, представленную на рисунке 2.2.
СЭП типа СП-6, применяемый на РЖД, устанавливается на стрелочном переводе на фундаментные угольники (ФУ). Связь СЭП с остряками обеспечивается при помощи рабочей (РТ) и контрольных тяг (КТ). При движении по стрелке по прямому пути со скоростями более 160 км/ч используется СЭП типа СП-12У с внешним замыкателем типа ВЗ-7 и, который имеет установочную схему, аналогичную приводу СП-6.
В отечественной конструкции СПУ электропривод, его гарнитура (СГ) и рамные рельсы представляют собой единую конструкцию, в связи с чем, фундаментные угольники крепятся к обоим рамным рельсам.
Это позволяет решать следующие задачи:
— осуществлять силовой передачей СЭП перемещение остряков стрелки на одно и тоже заданное расстояние, вне зависимости от перемещения стрелочного привода относительно оси пути в процессе эксплуатации, а так же производить запирание и контроль остряков в крайних положениях;
— исключать деформацию элементов СГ и СЭП при прогибах стрелочного перевода относительно земляного полотна, происходящих во время движения поезда.
Таким образом, компоновку всех узлов СЭП и СГ определила, по существу, идея фиксации перемещения остряков на заданное расстояние относительно жестко связанной конструкции — «СЭП — СГ — рельсы — шпалы».
В связи с этим основу СГ составляет каркас из двух ФУ, прикрепленных к рамным рельсам (РР) в точках 1, 2, 9, 10, и продольной связной полосы (ПСП), которая закреплена в точках 3 и 8 к ФУ. Рабочая (РТ), межостряковая (МТ) и контрольные (КТ) тяги связывают СЭП с остряками (О).
СЭП, закрепленный на ФУ в точках 4, 5, 6, 17 осуществляет запирание и контроль остряков в крайнем положении стрелки.
Такая компоновка СПУ обеспечивает простоту кинематической схемы СЭП и сосредоточение его силовых и контрольных узлов вне рельсовой колеи, что облегчает их обслуживание.
Рассматривая режимы работы, функциональную и установочную схемы можно сделать вывод, что надежность работы СПУ в эксплуатационных условиях определяется, главным образом, его способностью сохранять свои параметры в динамическом режиме и при взрезе, поскольку в рабочем режиме на элементы устройства действуют многократно меньшие силы.
Проведенные автором исследования позволяют дать общую оценку установочной схемы устройства «электропривод — гарнитура — стрелочный перевод»:
-напряжения, возникающие в узлах крепления фундаментных угольников к рамным рельсам при проходе поезда многократно превышают прочность этих узлов, в связи с чем роль ФУ, как стабилизаторов колеи несущественна, а именно:
-при креплении ФУ в четырех точках в моменты динамических напряжений создаются наиболее вероятные предпосылки для разрыва (деформации) узлов крепления СГ, а также увеличивается их износ;
-при уширении колеи появляется зазор между остряком и рамным рельсом, горизонтальные силы от колеса поезда через остряк направлены в сторону рамного рельса и, эти силы, выбирая зазор, прикладываются к узлам крепления тяг, что является одной из главных причин увеличения люфтов в элементах гарнитуры (хотя для перемещения остряков при нормальном переводе необходимо усилие всего лишь 2,5-3,5кН;
- из-за крепления ФУ за оба рамных рельса в четырех точках ушире- ние или сужение колеи в зоне стрелочного перевода не вызывает соответственного изменения относительного расстояния между СЭП и рамными рельсами, в связи с чем контрольное устройство СЭП не способно реагировать на эволюцию зазора между остряком и рамным рельсом;
- способ крепления ФУ к рельсам в четырех точках не позволяет разработать контрольное устройство, размещенное внутри СЭП, объективно оценивающее величину зазора «остряк — рамный рельс», что составляет в настоящее время важную техническую задачу;
- перенапряжения в узлах крепления ФУ деформируют элементы электрической изоляции ФУ от РР, что нарушает работу рельсовых цепей.
Защищенность СПУ от опасных состояний
Как известно, по характеру возникновения отказы подразделяются на внезапные и постепенные. Постепенный отказ возникает из-за плавного изменения параметров объекта, внезапный — из-за скачкообразного. Внезапный и постепенный отказы могут привести как к защитному, так и к опасному состоянию СПУ. В таблице 2.1 Приложения 1 перечислены характерные внезапные и постепенные отказы СПУ.
Опасным состоянием СПУ считается такое, которое создает угрозу безопасности движения.
Для отечественных СПУ это состояние характеризуется получением ложного контроля стрелки при:
-наличии зазора между прижатым (запертым) остряком и рамным рельсом, превышающим допустимое значение (4мм и более), что создает угрозу удара при набегании гребня колеса на остряк;
-уменьшении расстояния между отведенным остряком и рамным рельсом ниже допустимого значения (менее 125мм), что создает угрозу наезда колеса на отведенный остряк и сходу поезда;
-отсутствии запирания остряков (прижатого и отведенного); -деформации и изломах остяков и рамных рельсов, а также ослаблении их креплений к шпалам;
-деформации и изломах элементов гарнитуры, СЭП, а также ослаблении узлов их крепления; -взрезе стрелки.
Внезапные повреждения, вызывающие опасный отказ СЭП и СГ, типа излом, изгиб, обрыв одного из элементов, чаще являются следствием динамических воздействий подвижного состава или случайного события, например, удара по узлу СГ свешивающегося с поезда предмета.
Повреждение каркаса СПУ, произошедшее между точками 1- 2, 2 — 3, 4 — 5, 9- 8, 9-10, 6-7, 3-8 (рис. 1.2), не контролируется системой ЭЦ, но с определенной степенью вероятности не создает в течение установленного периода профилактического обслуживания непосредственной угрозы безопасности движения, т.к. из-за дублирования узлов крепления не происходит смещения привода относительно рамных рельсов.
Аналогичный отказ СГ в любой другой точке ФУ является опасным, т.к. сопровождается снижением усилия запирания остряков и изменением относительного расположения СП и рамных рельсов.
В таблице 2.2. приведены возможные отказы установочной гарнитуры. Таблица 2.2. Отказы установочной гарнитуры.
| Элемент каркаса гарнитуры | Отказ | Последствия отказа | |
| опасный | защитный | ||
| Узел крепления 1, 2,3,4,5 или 6,7,8,9,10 | — | обрыв | Накопление одиночных отказов |
| Звено 1-2, 2-3, 4-5 или 10-9,9-8,7-6 3-4,5-6 | — | излом | Накопление одиночных отказов |
| Звено 3-4, 8-7, | излом | — | Стрелка не заперта при сохранении контроле положения |
| Рамный рельс 1-10, 3-8 | отход | — | Увеличение зазора между О и РР при сохранении контроля запертой стрелки |
Особую опасность представляет излом подвижных частей гарнитуры — РТ или МТ тяги или разъединение (обрыв) узлов их крепления 11, 12, 13, 18. СПУ при этом не запирает остряки и, поэтому возможен сход поезда.
Излом рабочей тяги или обрыв узлов ее крепления 13, 18 во время перевода стрелки являются отказами контролируемыми, защитными, т. к. контрольные тяги при этом не перемещаются и контроля положения стрелки не будет. В тоже время обрыв узлов крепления 11 или 12 межостряковой тяги в момент пуска СЭП является опасным отказом, т.к. при реверсировании привода тяга может вернуть остряки в первоначальное положение, что приведет восстановлению контроля незапертой стрелки. Опасный отказ также возникает при недостаточно точной регулировке контрольных линеек, когда совмещенные вырезы контрольных линеек расположены так (рис.2.3), что между зубом ножевого рычага (НР) привода и скошенной гранью выреза имеется зазор. При изгибе, например, рабочей тяги, остряки стрелки отходят от рамного рельса, контрольные линейки, перемещаясь, выбирают этот зазор, не выводя ножевой рычаг из контрольного положения. При этом зазор «остряк рамный рельс» увеличивается больше допустимого, а контроль стрелки сохраняется.
Защитный отказ в системе ЭЦ наступает при повреждении контрольных тяг: излом, изгиб контрольной тяги или обрыв узлов ее крепления к острякам и приводу приводит к тому, что вырезы контрольных линеек не совмещаются и ножевой рычаг остается в рабочем положении.
Если допустить неординарность потока отказов, в частности, одновременный обрыв или изгиб контрольных тяг, то и в этом случае данное событие будет контролируемым, т.к. нарушится соответствие положений контрольного устройства и запирающего механизма СП.
В таблице 2.3 приведены возможные отказы соединительной гарнитуры.
| Элемент гарнитуры | Отказ в рабочем режиме | Последствия отказа | Отказ в контрольном или динамическом режиме | Последствия отказа | |||
| опасный | защити. | ||||||
| опасн. | защити. | ||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | |
| Связная тяга | |||||||
| Узел 11 или 12 | обрыв | — | Получение нового контроля незапертой стрелки после реверсирования | обрыв | — | Контроль незапертой стрелки | |
| Звено: 12-13, 11 — 13 | — | излом | Отсутствие контроля | излом | Контроль незапертой стрелки | ||
| Рабочая тяга | |||||||
| Звено 13 — 18 | изгиб | Контроль стрелки при увеличении зазора рис. 1.3 | изгиб | Сохранение контроля при увеличении зазора «О-РР» | |||
| излом | Отсутствие контроля | излом | Контроль незапертой стрелки | ||||
| Узел 13 или 18 | — | обрыв | Отсутствие контроля | обрыв | — | Контроль незапертой стрелки | |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| Контрольная тяга | ||||||
| Узел 14, 15, 16, 17 | — | обрыв | Отсутствие контроля | обрыв | — | Контроль стрелки при неисправности СГ |
| Звено 15-17, или 1416 | — | излом | Отсутствие контроля | излом | — | Контроль стрелки при неисправности СГ |
| — | изгиб | Отсутствие контроля | изгиб | — | Срыв контроля и отсутствие его после реверсирования | |
Контрольное устройство, работающее как электромеханический прибор с запоминанием каждого состояния контролируемого объекта (стрелки), не обеспечивает размыкания электрической контрольной цепи при изломе любого элемента СЭП и СГ, произошедшем в контрольном режиме (в статическом состоянии) их работы.
Это противоречит главному принципу конструирования ответственных приборов и устройств ЭЦ, которое заключается в приведении устройства в заграждающее (защитное) положение при внезапно возникшей неисправности.
Однако многолетний опыт эксплуатации не выявил того, что СЭП имеет в рабочем и контрольном режимах работы недостаточную защищенность от опасных отказов.
Это объясняется тем, что силовое воздействие на элементы контрольного устройства направлено при переводах стрелки на преодоление, в основном, лишь упругих сил пружины АП. Поэтому запас прочности оказался достаточным, чтобы сделать маловероятным такие события, как излом зуба ножевого рычага, срез оси рычага и аналогичные им.
Отказ типа «разрыв» силовых узлов СЭП, т.е. — запирающего механизма, шибера или главного вала, является опасным, если он произошел во время прохода по стрелке поезда.
Такие отказы могут быть вызваны силовым воздействием остряков на перечисленные узлы, вибрацией, тряской, следствием которых может быть и самоотпирание ЗМ.
Исследованиями (51,71) и опытом эксплуатации установлено, что запирающее устройство привода серии СП (кулачковый механизм), рабочий шибер, рабочая тяга, межостряковая тяга с узлами крепления обладают достаточным запасом прочности.
Напряжения, способные деформировать или разрушить какой-либо из перечисленных элементов, в динамическом режиме работы СЭП и СГ не возникают. Это объясняется конструктивной особенностью запирающего механизма, который не препятствует перемещению силовой цепи « шибер — рабочие тяги — прижатый остряк» к рамному рельсу (до 12мм) под действием колесных пар, и поэтому не испытывает чрезмерных динамических нагрузок, направленных именно в сторону рамного рельса. Действие сил, направленных в сторону ЗМ, вызванных вилянием экипажей при неплотным прижатием остряка к упоркам, не превышает 1000 Н.
Максимальные силы, действующие на элементы СЭП и СГ, развиваются при взрезе стрелки.
При взрезе остряков стрелки колеса поезда принудительно перемещают их и связанные с ними рабочие и контрольные тяги. Смещается при этом сначала контрольная линейка, связанная с отведенным остряком. Тупой вырез этой линейки выталкивает ножевой рычаг в среднее положение (поэтому кривой зуб не повреждается от выреза второй линейки). Происходит срыв контроля положения стрелки, что является защитным свойством СЭП, поэтому ножевой рычаг, ось его вращения и его кривой зуб являются ответственными элементами контрольного устройства привода.
Главнейшее требование к типовым приводам серии СП, связанное с обеспечением безопасности движения, состоит в контроле события взреза стрелки, которое должно сопровождаться потерей контроля и невозможностью последующего управления стрелочным электроприводом.
Как показали исследования автора, современные невзрезные СЭП данному требованию не удовлетворяют, т.к. при взрезе стрелки не обеспечивается размыкание всех рабочих контактов АП, а при определенных последствиях взреза не гарантируется размыкание всех контрольных контактов АП.
Если при взрезе СЭП будут сорваны болты крепления АП и он сместился вверх, то пружина вернет ножевой рычаг в контрольное положение, контакты замкнуться и будет получен ложный контроль. То же произойдет при изломе зуба или оси ножевого рычага
После взреза стрелки также сохраняется возможность дистанционного управления электродвигателем привода, что может привести к ложному контролю.
Принудительное перемещение рабочей тяги при взрезе стрелки в направлении отпирания остряка вызывает различные деформации гарнитуры и элементов привода. Деформации, сопровождающиеся при взрезе стрелки сохранением, либо получением нового контроля положения стрелки являются опасным отказом.
Обрыв после взреза рабочей тяги приводит к возможности беспрепятственного вращения двигателем главного вала СЭП, что предопределяет получение контроля стрелки при ее незапертом положении.
Изгиб рабочей тяги после взреза стрелки приводит к опасному отказу, если при этом ломается зуб контрольного рычага.
При взрезе, направленном от привода происходит излом бобышки подшипника главного вала. При этом нарушается зацепление шестерни с
шибером, что означает потерю СЭП запирающих свойств. В этом случае при пуске двигателя с поста ЭЦ и повороте главного вала происходит имитация нормального перевода, срабатывает АП и возникает контроль положения незапертой стрелки, т.е. опасный отказ.
При взрезе стрелки может деформироваться каркас гарнитуры, а СЭП и рабочие тяги могут остаться неповрежденными, если нормативное усилие запирания СЭП завышено. При этом, к опасным, относятся отказы (см. рис. 2.2):
обрыв узлов крепления к фундаментным угольникам (узлы 4 и 5, 6 и 7);
обрыв фундаментных угольников к рамным рельсам (узлы 9 и 10, 1 и 2);
изломы и изгибы фундаментных угольников (звенья 2-3, 3-4, 7-8, 8-9).
При обрыве узлов 4 и 5 или 6 и 7 при взрезе стрелки может произойти перекос привода.Ттогда либо сохранится контроль незапертой стрелки, либо он возникнет при реверсировании привода, причем в последнем случае стрелка может оказаться в среднем положении.
Аналогичные последствия отказа будут при обрыве узла 9 одновременно с узлом 10 или узла 1 с узлом 2 и при изломах звеньев фундаментных угольников 2-3, 4-3, 7-8, 8-9.
При изгибе фундаментных угольников в вертикальной плоскости сохраняется контроль положения незапертой стрелки, но при этом может произойти опасный отказ из-за увеличения зазора между прижатым остряком и рамным рельсом до 4 мм и более.
Возможные отказы гарнитуры и привода при взрезе стрелки, установленные автором, приведены в таблице 2.4.
| Элемент СП и СГ | Отказ | Последствия отказа | |
| опасный | защитный | ||
| 1 | 2 | 3 | 4 |
| Узел 3,4 Узел 2 и 1 Узел 15,16 Узел 9 и 10, 11 | обрыв | Контроль незапертой стрелки | |
| Звено 3-4 | Излом | Контроль незапертой стрелки | |
| — | изгиб | Потеря контроля | |
| при одновременном изломе ножевого рычага | Ложный контроль | ||
| Звено 1-3,2-3 | — | изгиб | Потеря контроля |
| Звено 11-15 Звено 12-16 | изгиб излом | — | Ложный контроль Контроль незапертой стрелки |
| Зуб ножевого рычага | излом | — | Ложный контроль |
| Подшипник оси главного вала, крепление АП к корпусу привода | излом | Контроль незапертой стрелки | |
Длительная эксплуатация невзрезных электроприводов серии СП и их стрелочных гарнитур, а также статистические данные указывают на то, что при взрезе наиболее часто фиксировались:
- изгиб рабочей тяги гарнитуры, который происходит, если усилие взреза направлено в сторону привода, при этом контрольный рычаг выводит¬ся в среднее положение контрольными линейками. Отказ в этом случае не опасный;
- излом бобышки с подшипником главного вала привода и узлов креп¬ления чугунного основания АП к корпусу привода, когда усилие взреза направлено от привода. При этом блок АП приподнимается и контрольные рычаги под действием пружины приводят рычаг в контрольное положение. Это опасный отказ.
Как указывалось выше, сохранение возможности дистанционного управления электродвигателем после взреза создает опасное состояние при¬водов типа СП.
На подвижной крестовине стрелки проекта 2726 (на участках с высо-коскоростным движением поездов, более 160км/час) установлен привод СП-12У с внешним замыкателем в первом сечении, т.е. на острие, и продоль¬ный рычажный механизм во втором сечении на расстоянии 4м от первого.
При этом используется только одна длинная контрольная тяга, кото¬рая крепится к контрольным линейкам. Концы линеек объединены металли¬ческой планкой. Таким образом, при переводе подвижной крестовины вслед за контрольной тягой двигаются обе контрольные линейки. Вырезы кон¬трольных линеек расположены и регулируются так же, как и в приводе на остряках, хотя взаимодействие линеек и зуба контрольного рычага при взре¬зе другое.
Как было указано выше, при взрезе остряков сначала двигается кон¬трольная линейка отведенного остряка (за счет изгиба рабочей и межостря- ковой тяги), которая своим тупым скосом выреза выталкивает контрольный рычаг в среднее не контрольное положение.
При взрезе подвижной крестовины происходит излом силового запи-рающего элемента (ов) гарнитуры или внешнего замыкателя и при одновре¬менном движении контрольных линеек контрольный рычаг выталкивается острым скосом выреза контрольной линейки. Но зуб контрольного рычага, имея фигурный профиль, не выходит из зацепления с острым скосом выреза линейки. При этом контрольный рычаг поворачивается и ножевыми контак¬тами ударяет по контактной колодке с рабочими
контактами и разбивает ее. Сцепленные острыми зубьями контрольный ры¬чаг и линейка препятствуют свободному перемещению контрольной тяги и она изгибается.
После взреза подвижный сердечник крестовины возвращается в край¬нее положение рычажным механизмом второго сечения, контрольная тяга занимает исходное положение, контрольный рычаг привода под действием пружины возвращается в контрольное положение (в вырез линейки) и полу¬чается контроль незапертой крестовины.
Если после взреза крестовины поезд остановится и начнет обратное движение, произойдет его сход.
Если после взреза крестовины поезд взрежет остряки в сторону при¬вода, то погнется рабочая тяга и ложного контроля не будет.
Если взрез будет направлен от привода, то может быть получен лож¬ный контроль.
Надежный контроль взреза остряков стрелки можно обеспечить, из¬менив форму межостряковой (или рабочей) тяги так, чтобы при взрезе она всегда деформировалась, независимо от направления взреза относительно привода. При этом, взаимоположение контрольных линеек и шибера нару¬шится, получить контроль при последующих переводах будет невозможно.
Возможно другое решение, при котором рассогласование взаимопо¬ложения шибера и контрольных линеек в момент взреза должно привести к физическому обрыву (обрыв провода) рабочей и контрольных цепей схемы управления СЭП.
Как было установлено автором, изменение параметров и нарушение взаимосвязей элементов СПУ происходит в динамическом режиме и при взрезе стрелки.
В рабочем режиме действуют многократно меньшие силы и поэтому остаточных деформаций нет. По этой причине проводившиеся теоретические и экспериментальные исследования (70, 72, 73) работы СЭП и СГ посвяща¬лись в основном динамическому режиму.
В результате были определены максимальные напряжения, возни¬кающие в запирающем механизме СЭП при проходе поезда, что позволило сделать вывод о достаточной прочности запирания остряков в условиях обычного и высокоскоростного движения.
В данной работе представлены исследования, выясняющие величины реально действующих динамических напряжений и усилий, возникающих в ФУ гарнитуры стрелок типа Р65 марок 1/11 и 1/18, и оценивающие их несущую способность в зависимости от способа крепления ФУ, который ока¬зывает влияние на устойчивость и безопасность конструкций СГ.
Устойчивость конструкций оценивается величиной деформаций при вертикальных просадках и горизонтальных смещениях рельсовых нитей от воздействия подвижного состава. Накопление остаточных деформаций опре-деляется уровнем действующих вертикальных и горизонтальных сил, качест¬вом подрельсового основания, степенью его уплотнения, упругими характе¬ристиками скреплений.
Остаточные деформации могут вызвать опасные состояния СЭП и СГ, при которых может возникнуть ложный контроль положения стрелки, или стрелка окажется незапертой в крайнем положении, или могут быть оба эти случая одновременно. Эти неисправности неминуемо приводят к ситуа¬ции, угрожающей безопасности движения поездов.
Исследование режимов работы стрелочных электроприводов
Стрелочный электропривод со своей гарнитурой имеет четыре режима:
Статический (контрольный) режим, при котором обеспечивается непрерывный контроль запертой стрелки.
- Режим перевода, при котором остряки и ПСК стрелки перемещают¬ся приводом на заданное расстояние и запираются в крайних положениях.
- Динамический режим, при котором обеспечивается запирание и непрерывный контроль положении стрелки и ПСК в условиях прохождения по ней подвижного состава. В этом режиме электропривод и гарнитура вос¬принимают со стороны колесных пар силовые механические воздействия в виде вибраций, колебаний и ударов.
- Аварийный режимд при котором происходят:
- взрез стрелки. Это означает, что подвижной состав, двигаясь в пошерстном направлении по стрелке по неправильному пути, колесными парами, принудительно перемещает запертые приводом остряки. Взрез стрелки является следствием нарушения организации движения поездов;
- изломы и остаточная деформация гарнитуры от ударов или зацепов предметами, которые свешиваются с подвижного состава ниже допустимого габарита;
- внезапная потеря (не получение) контроля стрелки из-за отказа меха-нического или электрического элемента АП;
- сохранение контроля незапертой стрелки или ложный контроль ее по-ложения во всех режимах работы.
Режим перевода стрелки
В процессе перевода стрелки энергия электропривода, затрачивается на работу по приведению остряков в движение в начале перевода и поддержанию движения в процессе перевода с необходимой скоростью (преодоление сил сопротивления движению остряков). Затрачиваемая энергия определяется как:
где: Тнач — энергия в начальный момент процесса перевода стрелки;
Туст — энергия в установившемся режиме движения остряков с постоянной скоростью.
^т’Ь^/Ж)2- динамическая составляющая кинетической энергии
движущихся частей стрелочного перевода;
^пр-а>2 =т’-1} 1 2 3 ‘ 2
т’ — удельная масса движущихся частей стрелки (остряков). Соотношение для энергии в установившемся режиме имеет следующий вид:
э
где: Зпр — приведенный момент инерции остряков; со -угловая скорость перемещения остряков; V- линейная скорость движения остряков. Соотношение между линейной и угловой скоростью имеет следующий вид:
У = о)-Ь, (2.4.5) тогда выражение для энергии в установившемся режиме можно записать как:
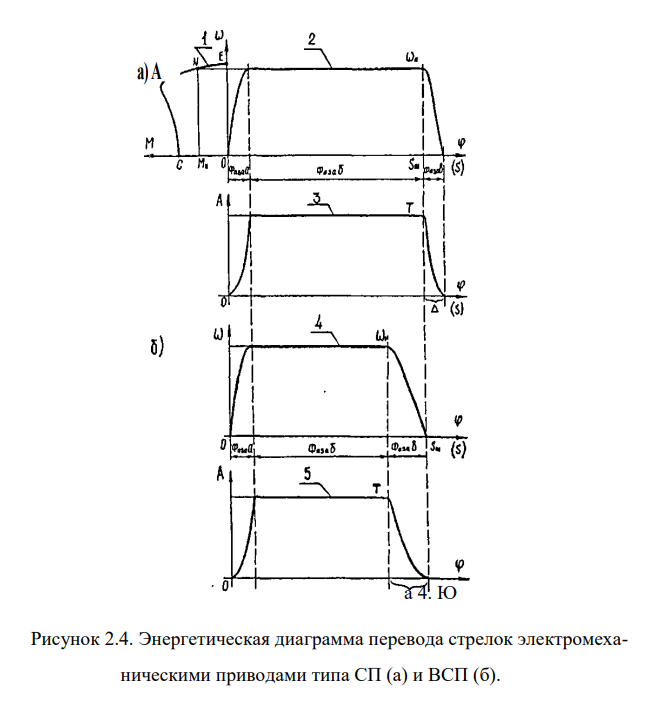
Приведенный момент инерции Зпр является величиной постоянной для конкретной стрелки и не зависит от угла ср, т.е. переменной является угловая скорость со. Зная закон изменения угловой скорости со, можно описать энергетический характер движения остряков (рис.2.4).
Анализ полученных зависимостей позволяет утверждать, что весь процесс перевода остряков стрелки, с точки зрения изменения кинетической энергии остряков, делится на три фазы:
разгон — приведение остряков из состояния покоя в состояние равномерного движения (фаза а)\
равномерное движение со скоростью со — установившийся режим (фаза б);
торможение — приведение остряков стрелки из состояния движения со скоростью со в состояние покоя, со= 0 (фаза в).
Разгон и торможение остряков относится к неустановившемуся режиму работы стрелочного электропривода.
Первая фаза а (рис.2.4) определяется механической характеристикой силового механизма. Например, электропривод с асинхронным двигателем переменного тока имеет механическую характеристику, показанную на рисунке 2.4.1а, кривая 1, повторяющую механическую характеристику электродвигателя в начальной ее стадии (участок СОКГ).
Вторая фаза движения остряков (фаза б) — равномерное движение с установившейся скоростью со. Равномерным это движение можно назвать с достаточной точностью по условию рабочей характеристики силового механизма.
Частота вращения ротора асинхронного электродвигателя с коротко- замкнутым ротором представляет собой жесткую характеристику (рис.2.4а, кр.1, участок БЕ), т.е., при достаточно значительном изменении нагрузки, его угловая скорость со изменяется незначительно и, в пределах номинальных нагрузок, практически остается постоянной.
Третья фаза — торможение (фаза в) представляет в режиме перевода остряка (шибера) в системе электрической централизации (ЭЦ) наибольший интерес, т.к. именно в этом конечном положении шибера (остряка) происходят динамические процессы, влияющие на надежность работы стрелочного перевода и гарнитуры.
Учитывая тот факт, что механическая система (остряки, гарнитура) является неизменяемой (Тнач = 0) соотношение (2.4.7.) приобретает следующий вид:
Ткон=^ле> (2.4.8.)
Выражение для определения работы, затраченной на преодоление сил трения остряков об стрелочные подкладки, имеет вид:

где: Мтр- приведенный момент трения остряков. Подставив соотношения (2.4.10.) и (2.4.11.) в выражение (2.4.9.), получаем соотношение, описывающее распределение энергии в установившемся режиме (перевод остряков с установившейся скоростью):
Выражение (2.4.12.) показывает, какой кинетической энергией остряки стрелки обладают при подходе к рамному рельсу, т.е.:
(2.4.13.)
Считая, что электродвигатель обладает значительным запасом мощности, и разгон происходит за короткий интервал времени, можно утверждать, что энергия движущихся частей стрелки в установившемся режиме затрачивается на перевод остряков стрелки и равна кинетической энергии остряков в конце перевода стрелки, т.е.:
(2.4.14.)
Анализ соотношения (2.4.14.) показывает, что в момент окончания рабочего хода шибера 5Ш, его линейная скорость V имеет максимальное значение, процесс торможения инерционной системы сопровождается только силовым фактором, которым является приведенный момент Мпр. Иначе говоря, для того чтобы остановить инерционную систему необходимо приложить к ней определенное силовое воздействие, направленное в сторону противоположную движению перемещающихся масс.
Во всех отечественных, кроме электроприводов серии ВСП, и в большинстве зарубежных стрелочных электроприводах третья фаза движе-
ния остряков осуществляется без участия механики электропривода, т. е. скорость движения остряков остается неизменной вплоть до отключения электродвигателя. Это означает, что работа по гашению кинетической энергии в конце перевода стрелки проводится лишь за счет сил трения в кинематических парах (в основном: остряк — подушка, и упругих сил рамного рельса и гарнитуры), т. е. без снижения ее самим электроприводом, что является недостаточным и приводит к ударам остряков о рамный рельс, его отжиму и отбою остряков. В практике имелись случаи излома остряков. При этом в стрелочных электроприводах серии СП к кинетической энергии остряков добавляется кинетическая энергия вращающихся масс самого электропривода.
Рассмотрим в качестве примера работу механизма запирания шибера электропривода серии СП. Поступательное движение шибера осуществляется путем реечной передачи от шестерни главного вала на рейку, которая выполнена заодно с шибером. Крайние зубья шестерни и рейки имеют специальную форму и являются запирающими зубьями в крайних положениях шибера. Недостатки данной конструкции, объясняются с позиции энергии движущихся масс тем, что в момент выработки шибером электропривода своего рабочего хода его линейная скорость V или угловая скорость остряков со имеет максимальное установившееся значение (рис. 2.4.1а, кр. 2) . Остряк подходит к рамному рельсу именно с такой скоростью, а запасенная кинетическая энергия движущихся масс Т, согласно выражению (2.4.3), как видно из графика (рис. 2.4.1а, кр.З), в виде упругого удара переходит в потенциальную энергию рамного рельса, отжимая его, рабочую тягу и гарнитуру крепления электропривода на величину А. Эти упругие силы приводят к ослаблению крепления электропривода и рамных рельсов.
Динамический коэффициент гашения кинетической энергии остряков показывает, какую часть кинетической энергии остряков в установившемся режиме составляет торможение остряков.
Таким образом, принимаем, что рабочий режим СПУ имеет два количественных показателя:
- усилие перевода номинальное, это есть сила, которую СЭП тратит на перемещение массы остряков плюс сила трения остряков о подушки.
- усилие перевода допустимое, превышение которого приводит к отжиму рамного рельса и получению ложного контроля стрелки при попадании постороннего предмета (камня) между остряком и рамным рельсом.
Статический режим
Статический есть пассивный режим работы и обеспечивает сохране¬ние запирание шибера и непрерывный контроль положения стрелки. Стрел¬ка, а соответственно и электропривод, в этом случае находятся в режиме ожидания: а) — прохода поезда по стрелке; б) — перевода стрелки.
Таким образом, принимаем, что статический режим СПУ имеет два качественных показателя:
- Наличие контроля положения стрелки и он достоверный.
- Отсутствие контроля положения стрелки из-за внезапного внутреннего отказа СПУ.
Динамический режим
Стрелочный электропривод в комплекте с гарнитурой является уст-ройством, от способности которого сохранять функции удержания остряков (подвижного сердечника крестовины) при динамическом воздействии на него со стороны подвижного состава, в значительной степени, зависит безопасность движения.
В динамическом режиме электропривод и гарнитура испытывают экстремальные механические нагрузки, воздействующие длительное время и имеющие большой спектр изменения амплитуды и частоты ударов, а потому их работа проходит в тяжелых условиях. Каждая из колесных пар подвижно¬го состава, обладая определенной массой (нагрузкой на ось), при проходе по стрелке является источником (генератором) колебательных процессов (уда¬ров и вибраций), которые воспринимаются, распределяются и гасятся в уст¬ройствах верхнего строения пути.
Работа электропривода, стрелочной гарнитуры, в отдельных случаях внешних замыкателей остряков (подвижных сердечников крестовин) в дина-мическом режиме заключается в выполнении тех же функций по удержанию в замкнутом состоянии и обеспечению контроля положения стрелки, что и в статическом режиме работы, но в условиях прохождения подвижного соста¬ва по стрелке. Поэтому на динамический режим работы возложено решение главной задачи по обеспечению безопасности движения поездов — надежное удержание прижатого (с допустимым зазором менее 4 мм) к рам¬ному рельсу остряка и отведенного остряка от другого рамного рельса, обес¬печивая желоб необходимой величины (не менее 125 мм) для прохода колеса подвижного состава с установленной скоростью.
В связи с этим рассмотрим некоторые методы обеспечения безопасности движения поездов стрелочным электроприводом и стрелочной гарнитурой в данном режиме работы.
При прохождении подвижного состава по стрелке и минимальной нагрузке на ось Gmin, в рабочей тяге возникают усилия упругой деформации Fynp. Для обеспечения надежной и безопасной работы стрелочного перевода эта деформация (изгиб) должна быть меньше 4 мм и находиться в зоне упругой деформации материала. Таким образом, значение усилия упругой дефор¬мации рабочей тяги Fynp находится в следующих пределах:

При дальнейшем росте усилия на шибере, действие упругой деформации прекращается и наступает потеря несущей способности гарнитуры (в первую очередь — рабочей тяги). Наступает пластическая (остаточная) деформация. Это усилие составляет: при сжатии рабочей тяги Гнес=35 кН, а при растяжении Енес = 75 кН (51). Такое расхождение объясняется не симметричной конструкцией рабочей тяги. Таким образом:
^>(0,65^1,5 )-От{п. (2.4.21)
Для определения величины усилия, обеспечивающего гарантированное удержание приводом прижатого остряка к рамному рельсу Г3, рассмотрим математическую модель взаимодействия колеса, остряка и электропривода, приведенную на рисунке 2.5.
На стрелочных переводах прижатие остряка к рамному рельсу происходит под начальным углом Д„ который образуется при теоретическом пересечении рабочей грани рамного рельса с рабочей гранью остряка.
Из полученного уравнения следует, что усилие запирания остряка приводом определяется выражением:
п/т — тангенс угла нормали контакта колеса с остряком, п/т =1/5; ку — коэффициент устойчивости колесной пары на рельсе, ку = 3,5-f5,0; кд — коэффициент динамики, уменьшающий фактическую нагрузку колес, по сравнению с ее статическим значением, кд = 0,25 -т-0,9.
Усилие, обеспечивающее надежное запирание (удержание) прижатого остряка должно удовлетворять следующему условию:
Fydep>F3. (2.4.24)
Данная величина нормирует предельно допустимые рабочие усилия, которые способен выдерживать стрелочный привод длительное время без разрушений и видимых деформаций (менее 4 мм).
Учитывая условие надежного запирания и угол удара ßy, выражение для определения усилия надежного удержания остряка имеет вид:
Fi=G‘k>’tgß>,n , (2.4.25)
т-кд
где:
G — нагрузка на ось, Gmax = 250 кН /46,53/; п/т — тангенс угла нормали контакта колеса с остряком, п/т =1/5; ку — коэффициент устойчивости колесной пары на рельсе, ку = 3,5-f5,0; кд — коэффициент динамики, уменьшающий фактическую нагрузку колес, по сравнению с ее статическим значением, кд = 0,25 -т-0,9.
В результате вычислений (2.4.25) получаем допустимое усилие запирания прижатого остряка к рамному рельсу варьируется в диапазоне ¥3 = 8,5-12,5 кН.
Усилия, возникающие при прохождении подвижного состава по стрелке и направленные на отжим прижатого остряка от рамного рельса, воспринимаются гарнитурой (рабочей тягой) и электроприводом (механизмом запирания шибера). Для обеспечения безопасности прохождения подвижного состава по стрелке усилие запирания (удержания) Р3 приводом прижатого остряка должно быть гарантированной величиной, поэтому оно увеличено в четыре раза.
Таким образом, показателями динамического режима можно считать:
- усилие запирания, что является увеличенным значением усилия удержания с целью повышения надежности ответственной функции СПУ. Верхней границей увеличения этого значения является усилие запирания, при котором легкая подвижная единица может быть вытолкнута из колеи при взрезе стрелки.
- усилие удержания, т. е. силу на шибере электропривода, которой достаточно, чтобы удержать остряк прижатым к рамному рельсу во время движения поезда по стрелке;
Аварийный режим взреза стрелки
При осуществлении маневров на станциях имеют место случаи взреза стрелки. На практике наиболее распространенным является взрез стрелки с бокового направления движения по стрелке, хотя может быть и с прямого направления. На рисунке 2.6 показаны схемы взрезов криволинейного (рис.2.6,а) и прямолинейного (рис.2.6,б) остряков.
Взрез стрелочного перевода с невзрезными стрелочными электроприводами серии СП приводит к остаточным деформациям остряков, соединительных и рабочих тяг, повреждению электропривода.
Остряки деформируются преимущественно в зоне строжки на участке 1000-1400 мм от острия. Деформация кривого остряка Р50 достигает 17 мм Р65 — 9 мм /49, 50/.
При перемещении взрезаемого остряка стрелки с типовой гарнитурой от воздействия движущегося экипажа возникают два варианта взреза:
1) при котором шибер «вталкивается» внутрь электропривода, в этом случае величина передаваемого в запирающий механизм усилия определяется пределом несущей способностью рабочей тяги и составляет 35 кН /71/;
2) при котором шибер, «выдергивается» из электропривода, в этом случае величина передаваемого через рабочую тягу усилие определяется прочностью элементов привода участвующих в запирании шибера и составляет 75 кН/71/.
Наиболее распространенным стрелочным электроприводом в настоящее время на железных дорогах России является СП-6, СП-3. На рисунке 2.7 показано действие сил, возникающих в механизме замыкания шибера электроприводов СП при взрезе, где:
Ж =Тщ,кН, (2.4.26)
где: Т^щ — усилие воздействия взрезаемого остряка на шибер,
а — угол направления воздействия усилия на подшипник главного вала.
Угол а =20-30° (по конструкции электропривода) сила N в 2-3 раза превышает усилие взреза — усилие на шибере, что приводит к неконтролируемой поломке корпуса подшипника главного вала. Привод при этом теряет свою запирающую способность.
Таким образом, по нашему мнению, проблема взреза стрелочных переводов с невзрезными стрелочными электроприводами сводится к решению 3-х задач:
1) обеспечение безопасного прохода подвижного состава по взрезаемой стрелке, т.е. усилие запирания приводом и гарнитурой остряка не должно приводить к выталкиванию колеса на рельсы;
2) обеспечение предсказуемости и наглядности повреждения конкретного элемента силовой цепи привод-тяга-остряк, т.е. наличие заведомо «слабого» элемента в силовой цепи удержания остряков;
3) обеспечение электрического контроля взреза стрелки и невозможности получения контроля незапертой стрелки до полного устранения последствий взреза.
При нормальной работе стрелочного перевода должно обеспечиваться целостность шибера и механизма запирания, а при взрезе -деформация рассчитанного на определенную механическую нагрузку слабого элемента силовой цепи с обязательным контролем взреза внутри электропривода и невозможностью получения ложного контроля.
При установке электропривода на стрелку с изогнутой рабочей тягой (типовая рабочая тяга), «слабым» элементом может служить именно она, при этом несущая способность и прочность всех других элементов, участвующих в работе по удержанию остряков, должна быть значительно (2,5-3,5 раза) выше. Изгиб рабочей тяги в этом случае контролируется АП привода и ее остаточная деформация приведет к потере контроля стрелки до замены тяги.
Для обеспечения безопасности движения поездов при взрезе стрелки обязательным условием должно быть превышение бокового усилия колеса к взрезаемому остряку над предельным усилием удержания остряка приводом в отведенном состоянии Руд‘ (рис. 2.8).
Рк > Руд‘ (2.4.27)
Для схемы, приведенной на рисунке 2.8, определим допустимое усилие удержания остряков на шибере, возникающее при взрезе стрелки с не- взрезным электроприводом. Согласно полученной формулы:
в{Ь-1){с1§тт13-0,5/1,) = ?уд * — *т ~ ¥пеР, кН——— (2.4.28)
L — 1)/L = 0,15-0,8 принимаем к расчету (L — 1)/L = 0,15;
f тр = 0,2 -коэффициент трения остряков о подушки;
Fnep = 4,5 кН — масса остряков;
G min = 50 кН — нагрузка на ось порожней платформы /46/,
G max = 250 кН — максимальная нагрузка на ось /46/;
Получим:
Fm = 85кН для G min.
Fm = 406 кН ДЛЯ G тах.
Таким образом, по условию 2.4.28 нам удалось определить, что даже самая легкая подвижная единица перемещает запертые приводом и рабочей тягой остряки, т.к. усилие удержания прижатого к рамному рельсу остряка типовой рабочей тягой (35кН) и прочность запирающего узла электропривода (75кН) меньше усилия взреза.
Исследование динамики взреза стрелки с невзрезным стрелочным электроприводом
Рассмотрим более подробно поведение стрелочного перевода и колесной пары подвижного состава, определим их взаимное положение в момент взреза, точку взреза, величину максимального смещения остряка (прогиба) в точке взреза.
В качестве примера возьмем несимметричный перевод с длинной остряков 8300 мм Р65 марки 1/11 (принципиального отличия другие стрелочные переводы не имеют). Движение колесной пары по прямому пути — пошерстный взрез. На рисунке 2.9 приведена расчетная схема стрелочного перевода при взрезе.
Рассмотрим самый неблагоприятный случай в отношении обеспечения устойчивости колеса против выдавливания из колеи:
- самая легкая подвижная единица;
- самое большое усилие удержания остряков.
- Взаимодействие рельса и колеса согласно рисунку 2.9;
- Усилие удержания остряков электроприводом Руд = 7,5 кН — потеря несущей способности рабочей тяги и излом элементов привода при вытягивании рабочего шибера из электропривода;
- Коэффициент трения принимаем £^=0,2;
- Длина остряка Ь= 8,3 м.
Тогда согласно рисунка 2.9 усилие бокового нажатия колеса на остряк определяется:
Действующие силы — боковое нажатие колеса на остряк компенсируются следующими силовыми факторами:
- усилием перемещения колесом массы остряков в точке приложения рабочей тяги -Рпер=4,5 кН.
- усилием преодоления сил трения от давления колеса на отведенный остряк 5,2 кН.
- усилием удержания остряков рабочей тягой (несущей способностью рабочей тяги и привода), Г уд=7,5 кН.
Согласно расчетной схемы (рис.2.8) составам уравнение равновесия сил:
Из уравнения 2.4.32 определим точку взреза, при условии, что прогиб остряка равен нулю.
где: а — расстояние от корня остряка до точки взреза; L — полная длина остряка, = 8,3 м;
al= 4‘5 + 7‘5 -(8,3-0,36) = 4,28 м 23,4-0,52
Смещение остряка обеспечивается в основном следующими четырьмя факторами, присутствующими при взрезе стрелки одновременно:
1) упругой деформацией остряков;
2) упругой деформацией установочной гарнитуры;
3) упругой и остаточной деформацией рабочей тяги;
4) упругой и остаточной деформацией межостряковой тяги.
Нами установлено, что основным фактором в обеспечении смещения остряка и прохода подвижного состава по стрелке при взрезе является остаточная деформация рабочей тяги.
Проанализируем теоретический график зависимости между растягивающей силой FyA и деформацией (удлинением, сжатием) рабочей тяги.
На графике (рисунок 2.10) имеется ряд характерных точек: 0, А, В, С, D, М, К, L .
В начале, на участке ОА график представляет собой наклонную прямую. В этих пределах напряжения СУ растут пропорционально деформациям
т.е. соблюдается закон Гука, который справедлив до предела пропорциональности СТПц /62/. На этом участке графика расположены рабочая зона с усилиями перевода приводом остряков Fnep = 7,5 кН и номинальном усилием удержания остряков шибером привода в запертом состоянии F3 = 50 кН.
Выше точки А диаграмма искривляется, закон Гука нарушается, деформации начинают расти быстрее роста напряжений. Очень близко к точке А на криволинейном участке диаграммы можно отметить точку В, соответствующую пределу упругости Gyn. Максимальное напряжение, которое может выдержать материал, не обнаруживая признаков остаточной деформации при нагружении.
Точка В находится вблизи точки А, поэтому их часто считают совпадающими. Начиная с некоторого момента, при дальнейшем увеличении деформаций нагрузка вновь увеличивается. Диаграмма изменяется по плавной кривой с наивысшей точкой D, в которой условное напряжение принимает
наибольшее значение, достигая предела прочности CJB, под которым понимают предел прочности или временным сопротивлением.
Если через точку В провести вертикальную линию, то левее этой линии на диаграмме будет зона упругих, а правее — зона упруго-пластических деформаций (т.к. там будут иметь место и упругие и пластические деформации).
Начиная с некоторой точки С график имеет горизонтальный (или почти горизонтальный) участок, которому соответствует предел текучести ат. На этом участке деформации растут без увеличения нагрузки — материал как бы «течет».
Начиная с некоторого момента, при дальнейшем увеличении деформаций нагрузка вновь увеличивается. График изменяется по плавной кривой с наивысшей точкой Б, в которой условное напряжение принимает наибольшее значение, достигая предела прочности ав, под которым понимают предел прочности.
До достижения предела прочности продольные и поперечные деформации равномерно распределяются по расчетной длине тяги.
После достижения точки Б графика, эти деформации концентрируются в одном наиболее слабом месте, где начинает образовываться «шейка» — местное значительное сужение, которое быстро прогрессирует.
За точкой Э ординаты графика начинают уменьшаться, нагрузка падает, что объясняется дальнейшим уменьшением поперечного сечения шейки. Наконец происходит ее разрыв. Этому на графике соответствует точка М и условное напряжение <тр.
В реальных условиях разрыв рабочей тяги не происходит, что объясняется наличием зоны ее рабочей (реальной) деформации, не доходящей до точки Э, и тем более до точки М диаграммы.
Если, начиная с некоторой точки К графика, будем разгружать тягу, то график пойдет по прямой ККЬ приблизительно параллельно прямой ОА. Отрезок ОК1 равен остаточной деформации До, соответствующей точке К, а отрезок К1К2 — упругой деформации Ду, соответствующей той же точке. Полная деформация А равна сумме двух указанных деформаций:
Таким образом, нами показано, что наличием деформации (пластической и упругой) рабочей тяги, а также наличием деформации остряков, гарнитуры и др. обеспечивается безопасный проход подвижного состава по стрелочному переводу при взрезе стрелки.
Обязательным условием обеспечения безопасности при взрезе должно быть наличие необходимой прочности стрелки при работе ее остряков на изгиб от бокового давления на стрелку со стороны колеса подвижного состава, до того момента, когда колесо своей поверхностью катания не окажется над рамным рельсом.
Прочностные свойства стандартного острякового рельса не вызывают сомнения и обеспечивают его с достаточным запасом прочности. Однако в целях обеспечения плавности прохода подвижного состава по стрелке, остряк, изготавливаемый из острякового рельса, имеет горизонтальную строжку, образующую из головки рельса «гребень» различного сечения, который начинается от полной головки острякового рельса (рисунок 2.11, сечение V-V), до нескольких миллиметров у пера остряка (рисунок 2.11, сечение I-I) /66/. Излом гребня остряка возможен лишь в той зоне, где прочность сечения его гребня не выдерживает усилия удержания остряка Fya. Если принять, что прочностные свойства металла колеса и острякового рельса близки по величине, то при взрезе стрелки излом гребня остряка наиболее вероятен на участке от сечения III-III до пера (начала) остряка (сечение I-I), т.к., начиная примерно с этой точки, толщина гребня остряка приблизительно равна толщине гребня колеса (рисунок 2.9), а затем уменьшается до нескольких миллиметров.
На рисунке 2.11 нами показана циклограмма проследования колеса по взрезанному остряку (ранее отведенному).
Согласно рисунка 2.9. ширина круга катания стандартного профиля колеса составляет 91,4 мм. При проходе колесной пары по стрелке не своего маршрута в пошерстном направлении (рис. 2.9) колесная пара, стремясь создать себе колею, выдавливает (смещает) ранее отведенный остряк к своему рамному рельсу (согласно нашего расчета в точке взреза смещение 77,3 мм), что приводит остряк практически в плотную к своему рамному рельсу и, начиная с позиции V-V, колесо, прокатываясь по остряку, частично (91,4-72,6=18,8 мм) зависает над рамным рельсом. Причем эта величина (зависание) все увеличивается и постепенно поверхность катания колеса переходит на рамный рельс. В точке вероятного излома гребня остряка (сечение III-III) колесо своей поверхностью катания уже находится над рамным рельсом (91,4 — 20 = 71,4 мм). Таким образом нами доказано, что даже при изломе гребня остряка, схода подвижного состава не произойдет, что гарантирует устойчивое и безопасное прохождение подвижного состава по стрелке.
СПУ для высокоскоростных магистралей (ВСМ)
Скоростным на РЖД считается движение поездов со скоростью от 160км/ч. Движение со скоростью 250км/ч и более считается /6/ высокоскоростным.
Впервые регулярное высокоскоростное движения началось в Японии в 1964году на участке в 515 км между городами Токио — Осака. С 1981 года начались регулярные высокоскоростные перевозки пассажиров во Франции, затем в Германии, Испании, Италии и других европейских странах. Чуть позже европейские железные дороги объединились в единую скоростную сеть.
Сейчас, в Германии, Англии, Швеции, Финляндии скорость движения пассажирских поездов на определенных участках не превышает 230 км/ч. Во Франции на участке Лиль — Париж — Лион — Марсель скорость поездов составляет до 300 км/ч, на участке Париж — Страсбург — до 350 км/ч. В Испании на участке Барселона — Мадрид — Севилья скорость — до 300 км/ч. В Италии на участках Рим — Наполи и Турин — Милан — Болонья — до ЗООкм/ч /79/.
Скорость движения поездов продолжает расти с каждым годом, что составит серьезную конкуренцию авиации в ближайшем будущем.
В России высокоскоростное движение (до 250 км/ч) пассажирских поездов «Сапсан» («Velaro RUS», Siemens, Германия) началось в конце 2009 года между Москвой и Санкт — Петербургом. Ранее, с 1963 года, было организовано регулярное движение поезда «Аврора» со скоростью 160 км/ч, затем с 1984 года — «ЭР200», с 2001 года — «Невский Экспресс» (до 200 км/ч).
Скорость движения поездов по стрелке определяется прежде всего типом уложенного стрелочного перевода.
На высокоскоростных магистралях РЖД применяются стрелочные переводы с длинными гибкими остряками, с подвижными сердечниками и непрерывной поверхностью качения колеса, с маркой крестовин
- 1/11- для движения со скоростями до 250км/ч по прямому пути и 40км/час на боковой путь;
- 1/18 , 1/22 — для скоростей до 350 км/ч по прямому и 80 км/ч на боковой путь;
- 1/33, 1/42 — для скоростей до 450 км/ч по прямому и 120 км/ч на боковой путь.
Для перевода длинных гибких остряков и обеспечения их плотного прилегания к рамному рельсу необходимы особые требования, а также дополнительные переводные и контрольные устройства, количество которых зависит от типа уложенного в путь стрелочного перевода (т.е. конкретного проекта).
На РЖД между Москвой и Санкт — Петербургом в настоящее время для организации движения со скоростями до 200 км/ч используются стрелочные переводы типа Р65 марки 1/11 проекта 2726 и проекта 2956 на участке со скоростями до 250 км/ч.
Для перевода стрелки проекта 2726 установлены (рис.2.12)
- СЭП 1 типа СП-12У с внешним замыкателем ВЗ-7(ВЗ) на остряках и с рычажным переводным механизмом без замыкателя;
- СЭП 2 типа СП-12У с внешним замыкателем ВЗК на крестовине и с рычажным переводным механизмом без замыкателя.
Переводные рычажные механизмы широко используются за рубежом, но, в отличие от наших, совместно с внешними замыкателями в каждом сечении, что значительно повышает безопасность движения поездов по стрелке /69/.
На РЖД принято устанавливать внешние замыкатели на стрелочных переводах при скоростях движения поездов 160 км/ч и более. При меньших скоростях применяются электроприводы с внутренним замыканием типа СП-6М.
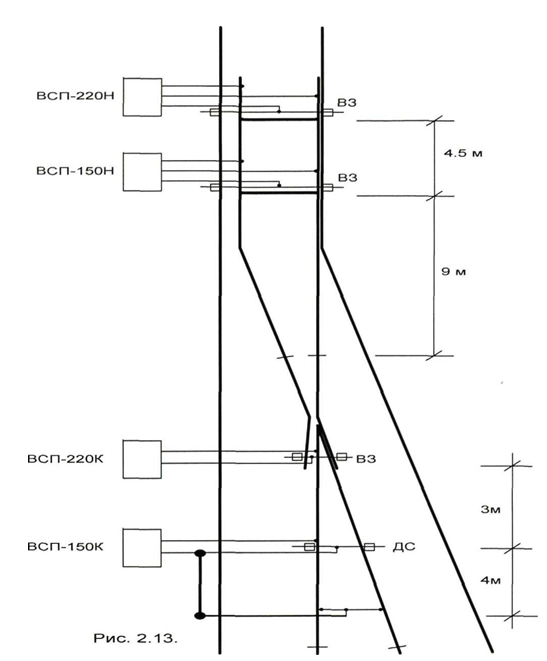
Для перевода и контроля стрелки проекта 2956 установлены (рис. 2.13):
на остряках
- СЭП 1 типа ВСП-220Н с внешними замыкателем ВЗ-7 в первом сечении;
-СЭП2 типаВСП-150Н с ВЗ-7 во втором сечении (в 4-х метрах от первого), на крестовине
- СЭП 3 типа ВСП-220К с внешним замыкателем ВЗК в первом сечении,
- СЭП 4 типа В СП-15 ОК с внешним дожимател ем (Д С) во втором сечении и переводным рычажным механизмом в третьем сечении.
Причем два электропривода СЭП1 и СЭП2 работают одновременно и переводят подвижный сердечник крестовины, затем, два других электропривода СЭПЗ и СЭП4 также работают одновременно и переводят остряки.
Электропривод, установленный в первом сечении (по оси межостря- ковой тяги) должен переместить остряки на 150мм, во втором сечении (в конце острожки) — на 70мм. Также переводится и на крестовина.
Эти различия в ходе, характерные для длинных остряков и подвижной крестовины, предопределили применение приводов с различным ходом шибера. Однако, время перевода приводов должно быть одинаковое. Поэтому, для выравнивания угловых скоростей, в приводе с большим ходом шибера используется электродвигатель с большим числом оборотов вала и большей мощности, т. к. он «стартует» раньше и раньше принимает на себя силовую нагрузку со стороны остряков. В некоторых зарубежных электроприводах, например, компании Bombardier привод ЕВЬ Switch 2000, для выравнивания угловых скоростей применяют программируемые преобразователи частоты.
Выводы
В ходе проведенных исследований установлено:
- При принятом способе установки СЭП на ФУ, закрепленных в четырех точках к обоим рамным рельсам, создаются предпосылки для ослабле¬ния или разрыва узлов крепления ФУ в моменты динамических перенапря¬жений.
- Исходя из допускаемых напряжений, сами фундаментные угольники имеют трехкратный запас прочности, причем максимальные напряжения возникают непосредственно в зоне крепления фундаментных угольников к рамному рельсу.
- Уширение или сужение колеи в зоне стрелочного перевода не вызывает соответственного изменения относительного расстояния между корпу¬сом СЭП и рамными рельсами, в связи с чем СПУ не осуществляет достовер¬ный контроль плотности прилегания остряка к рамному рельсу.
- Наличие, хоть и допустимого, зазора между прижатым остряком и рамным рельсом приводит к появлению силовых ударных воздействий от ко¬леса поезда и остряка на изолирующие втулки и шарнирные соединения гар¬нитуры, следствием чего является их быстрый износ и отказ.
- Безопасность движения поездов по стрелочному переводу, при отсутствии достоверного дистанционного контроля, зависит на сегодняшний день лишь от качества регулировочных и профилактических работ обслу¬живающего персонала.
- Для уменьшения вероятности опасных отказов от динамических воз-действий необходимо изменить установочную схему СПУ. Для исключения ложного контроля при взрезе стрелки необходимо использовать принцип симметричной деформации межостряковой или рабочей тяги. Для обеспечения достоверности контроля плотности прилегания запертого остряка к рам¬ному. рельсу необходимо пересмотреть общепринятый принцип распределе¬ния функций главных узлов СЭП и СПУ в целом.
Список литературы
- Анализ состояния безопасности движения поездов и работы устройств СЦБ, механизированных горок в хозяйстве сигнализации, связи и вы¬числительной техники за 1999 год. Москва. МПС. Управление сигнали¬зации, связи и ВТ. — 2000. — 23 с.
- Анализ состояния безопасности движения поездов и работы устройств СЦБ, механизированных горок в хозяйстве сигнализации, связи и вычислительной техники за 2000 год. Москва. МПС. Управление сигнализации, связи и ВТ. — 2001. — 25 с.
- Железнодорожный транспорт в 1995 году: цифры и факты. // Железно-дорожный транспорт — 1996, №4.
Ю.Железнодорожный транспорт в 1996 году: цифры и факты. // Железно-дорожный транспорт — 1997, №4.
11 .Железнодорожный транспорт в 1997 году: цифры и факты . // Железно-дорожный транспорт — 1998, №5. - Железнодорожный транспорт в 1999 году: цифры и факты. // Железно-дорожный транспорт. — 2000, №5.
- Статистический отчет о работе железных дорог за 1999 год. — М.: МПС. Управление статистики. — 2000. — С. 60.
- Железные дороги России в 2000 году. // Железнодорожный транспорт. -2001, №4.-С. 2-4.
- Железнодорожный транспорт в цифрах. // Железнодорожный транс¬порт. — 1997.-№10. — С. 2-3.
- Железнодорожный транспорт в 1998 году: цифры и факты. // Железно-дорожный транспорт. — 1999. — №5. — С. 7-12.
17.0днопозов Ю.А., Хилькевич И.А. Электрическая централизация манев¬ровых районов станций. — М.: — Транспорт, — 1985. — С. 9-66. - Телеуправление стрелками и сигналами. / Переборов A.C., Брылеев А.М., Ефимов В.Ю., Кокурин И.М., Кондратенко Л.Ф. — М.: Транспорт, -1981. -С. 194-210.
- Новые устройства СЦБ в Финляндии. // Железные дороги мира. — 2002. № 12. — С.57-80.
- Храпатый A.B. Повышение безопасности движения на базе новых тех-нических средств. // Железнодорожный транспорт. 2002. № 12. — С. 8-12.
21 .Новые технические средства для железнодорожного транспорта. // Же¬лезные дороги мира — 1997. — №7. — С. 39. (J. Hille. Yerlcebr .d Technik, 1995, №6, s.221-228, №7, s.265-267). - Информационные технологии управления инфраструктурой железнодо-рожного транспорта. / Андрианов В.П., Антропов B.C., Райков Г.В., За¬харов Я.Л., Подшивалов А.Б., Бакеев Е.Е. // Железнодорожный транс¬порт. — 1998. — №6. — С. 96-97.
- Куммер П.И., Коптева Т.В. Электронные системы автоматики на зару¬бежных железных дорогах. — М.: — Транспорт, — 1990. — С. 86-100.
- Резников Ю.М. Электроприводы железнодорожной автоматики и теле-механики — М.: Транспорт, — 1985. — 288 с.
- Минаков Е.Ю. Синтез стрелочных электроприводов с внутренним за-мыканием шибера. Диссертация на соискание ученой степени кандида¬та технических наук. — Москва, — 1999. — 221 с.
- Малышев А.Д., Минаков Е.Ю. и др. Взрезной стрелочный электропри¬вод. Отчет по НИР. Технический проект. ВЗИИТ, — 1991. — 74 с.
- Кондратенко Л.Ф., Минаков Е.Ю., Низовцев В.В., Степанов Ю.С., Ус- кова H.H., Шуваев В.В. Стрелочный электропривод винтовой взрезной с ходом шибера до 220 мм (СПВВ-2-220): Отчет по НИР. Эскизный проект. ВЗИИТ, — 1993. — 81 с.
- Сороко В.И., Милюков В.А. Аппаратура железнодорожной автоматики и телемеханики: Справочник. Кн.1, — М.: НПФ Планета, — 2000. С. 9-76.
- Патент № 2181678. Винтовой стрелочный электропривод с внутренним замыканием шибера, взрезной, для работы с внешними замыкателями
- остряков стрелки и подвижных сердечников крестовин/ Авт. изобрет. Е.Ю. Минаков. — Заявл. 23.12.98 № 981123439.