Цикл статей:
Глава 1 – Устройства обеспечения безопасности движения поездов по железнодорожным стрелкамГлава 2 – Анализ структуры и режимов работы стрелочных переводных устройств(СПУ)
Глава 3 – Синтез СПУ нового поколения
Глава 4 –Совершенствование элементов СПУ
Модернизация электроприводов серии СП
При создании нового СПУ учитывалась необходимость модернизации применяемых в настоящее время на сети РЖД приводов серии СП.
Эта модернизация направлена прежде всего на замену контактного блока АП ножевого открытого типа, на долю которого приходится половина от всех отказов привода.
У электроприводов серии СП на главном валу редуктора находится шиберная шестерня, угол поворота которой определяет линейный ход шибера.
Узел запирания использован кулачкового типа и выполнен в виде скошенных зубьев шиберной шестерни и шибера. Запирание происходит после поворота шестерни, когда ее скошенный зуб упрется в скошенный зуб шибера в конце его хода. При этом, обратному ходу шибера препятствует скошенный зуб шестерни, но по прямому ходу обеспечивается возможность свободного движения (в пределах 12мм) шибера. Этим достигается защита узла запирания привода от разрушения, т. к. при проходе поезда по стрелке остряк с рамным рельсом упруго смещаются относительно оси пути.
Узел контроля или автопереключатель (АП) привода СП исполнен как механический компаратор, т. е. как элемент сравнения, во-первых, нормированного хода шибера и его запирания и, во-вторых, фактического перемещения на заданное расстояние контрольных линеек вслед за остряками стрелки. В случае совпадения этих двух событий в АП под действием пружины переключается контрольный рычаг. Западание ролика рычага в вырез шайбы главного вала подтверждает, что шибер заперт после нормированного хода, а западание клювообразного конца рычага в вырезы контрольных линеек подтверждает, что остряки стрелки переместились на заданное расстояние. Контрольный рычаг управляет электрическими контактами АП.
Перемещение контрольного рычага из рабочего положения в контрольное под действием пружины обеспечивает быстрое (мгновенное) размыкание контактов, управляющих электродвигателем, что особенно важно для двигателей постоянного тока.
Электрический элемент приводов СП — это контактная группа, состоящая из открытых подвижных и неподвижных контактов, так называемый АП ножевого типа. Причиной отказов АП является нарушение в процессе эксплуатации соосности подвижных и неподвижных контактов. Это приводит к изгибу неподвижных пружинных контактов, уменьшению контактного давления, искрению и нагреванию контактной поверхности и, затем к нарушению (обрыву) контакта электрической цепи. Кроме этого поверхности открытых контактных пружин индевеют при низких температурах окружающего воздуха, что также приводит к нарушению контакта.
В качестве электрических элементов АП в зарубежных электроприводах чаще всего используются электрические кнопочные микропереключатели /15/. Благодаря малому ходу (2-3 мм) кнопки для мгновенного переключения контактов, такие микропереключатели иногда используют непосредственно для контроля нормативного хода шибера.
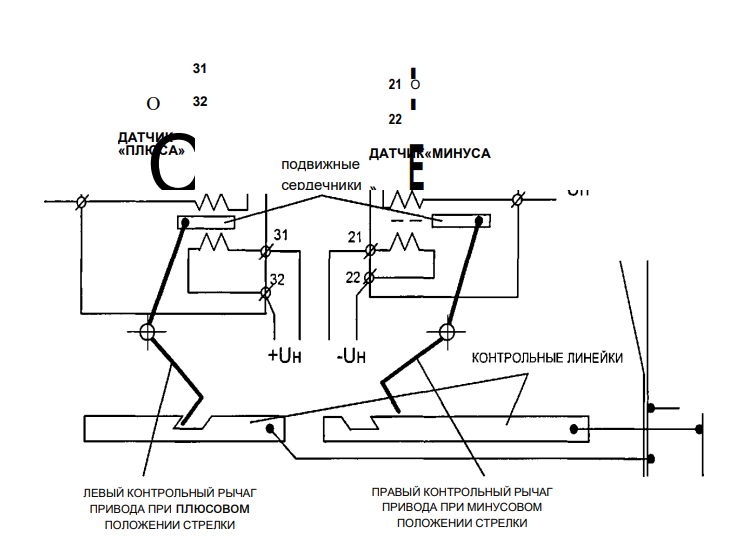
Выключатели (датчики перемещения) могут быть контактные и бесконтактные, во — первых, по способу взаимодействия с контролируемым объектом, т.е. с физической механической связью или без нее, во — вторых, по используемой элементной базе — контакты с физическим разрывом электрической цепи (контактные) или полупроводники, трансформаторы, резисторы (бесконтактные). К бесконтактным, по способу управления, можно отнести датчики с магнитоуправляемым герметизированным контактом — герконом. Примером использования отечественных бесконтактных (по элементной базе) датчиков является стрелочный горочный электропривод СПГБ-4. В нем используются бесконтактные датчики типа ДБП и ДБ Л трансформаторного типа с подвижным сердечником, которым управляет контрольный рычаг АП.
Из всего многообразия бесконтактных датчиков, давно и успешно применяемых в промышленности, для стрелочных электроприводов подходят не многие. Применение ограничено требованиями безопасности, которые предъявляются к напольным устройствам и ответственным цепям железнодорожной автоматики.
Главным при выборе датчиков является то, что отказ любого элемента (в том числе и датчика АП) контрольной цепи схемы управления электроприводом не должен привести к получению на посту ЭЦ ложного контроля положения стрелки.
Отказ может произойти как от внешних воздействий на контрольный датчик, так и от его внутренних внезапных или постепенных изменений.
Отказами схемы управления и контроля электропривода (схемы) являются случайные однополюсные физические сообщения проводов, в том числе и с проводами смежных цепей. Отказами схемы являются также ошибочные действия обслуживающего персонала: перепутывание линейных проводов (жил) в кабельных муфтах и проводов контрольных датчиков, коротком замыкании или обрыве проводов. Кроме этого схема должна контролировать внезапную потерю управляемости датчика. Указанные отказы схемы не должны приводить к ложному контролю на посту ЭЦ.
На работу датчиков могут оказывать влияния: соседние по кабелю цепи — через емкость кабельных жил; наведенные электромагнитные токи от линий электротяги и высоковольтных линий электропередачи, электростатические источники; выбросы токов при выключении индуктивных нагрузок (реле) и другие факторы.
В этой связи датчики, чувствительные к внешним электромагнитным влияниям (к ним относятся индуктивные, емкостные, оптические, датчики
Холла и др.) совместно со схемой их включения обязательно проверяются на ЭМС в испытательных центрах. Реально возникающие при эксплуатации внешние воздействия не должны приводить к отказу датчика.
Все датчики проверяются также на функциональную безопасность, при которой отказ в виде короткого замыкания или обрыва внутреннего элемента датчика не должен привести к получению ложного контроля.
В полупроводниковых датчиках кроме коротких замыканий и обрывов при анализе безопасности учитывается возможная трансформация (переход) транзистора или тиристора в диод и, если схема это не контролирует защитным отказом, применение такого датчика недопустимо.
Исследования автора и анализ структуры различных датчиков, их характеристик, конструкций, области применения в промышленности, обеспечения датчиками отраслевых требований безопасности, а также экономической целесообразности, привели к выводу, что наиболее пригодными для применения в АП привода являются датчики трех типов: трансформаторные с подвижным сердечником, резистивные и герконовые.
Принцип действия трансформаторного датчика основан на индуктивном взаимодействии двух электрических обмоток через общий сердечник (рис.4.1), который непосредственно физически связан с контрольным рычагом АП. На одну обмотку датчика подается напряжение, вторая обмотка подключена к нагрузке. Если контрольный рычаг привода подвел сердечник к обмоткам, то возникает трансформация полезного сигнала на выходе датчика и на нагрузке.
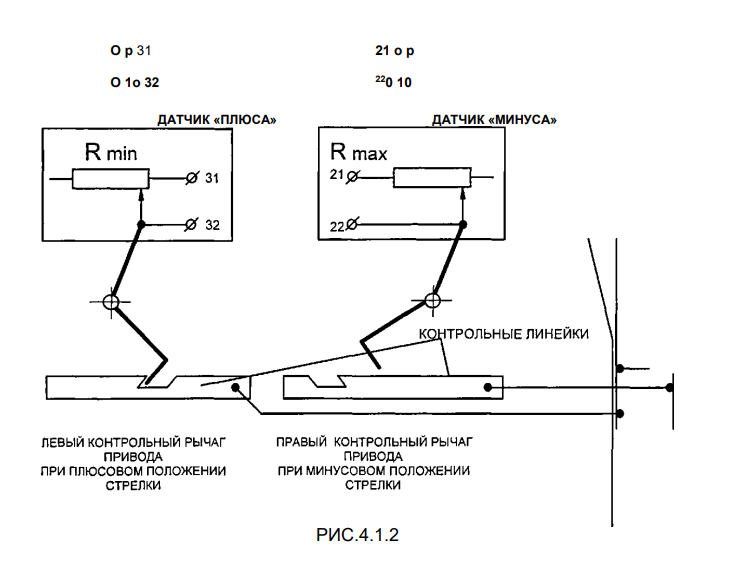
Принцип действия резистивного датчика основан на изменении электрического сопротивления в контрольной цепи при взаимодействии контрольного рычага АП и ползунка переменного резистора (рис.4.2).
Переменный резистор при этом работает в режиме «включено — выключено». Выключению соответствует максимальное сопротивление на выходе датчика, включению — минимальное. Коммутация при этом происходит без физического разрыва электрической цепи. Современные переменные резисторы с металлопластиковой дорожкой обеспечивают высокую надежность датчиков при требуемых на РЖД условиях эксплуатации.
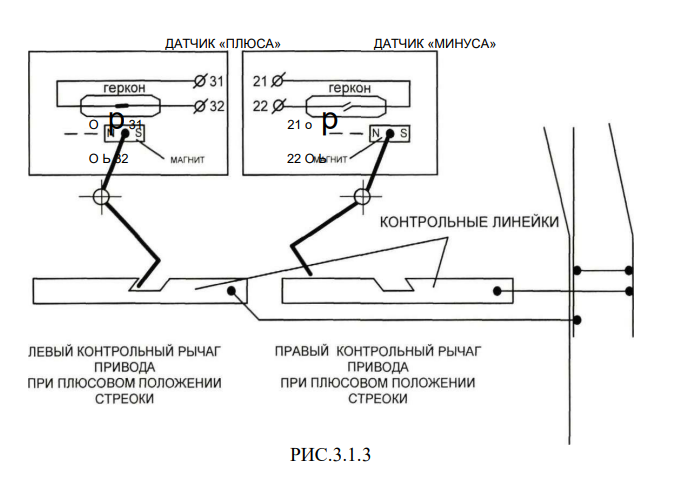
Принцип действия герконового датчика основан на взаимодействии и взаимоположении геркона и постоянного магнита. Магнит датчика конструктивно связан с контрольным рычагом АП и, в зависимости от его положения, включает или выключает геркон (рис.4.3). Закрытый стальной корпус датчика защищает геркон от внешних магнитных полей.
Герконы и герконовые датчики широко применяются в устройствах связи, станкостроении, авиации, автомобилях и др., как дешевые и надежные устройства. Автором разработана конструкция герконового датчика для привода СП-6М, который в настоящее время проходит опытную эксплуатацию на станции Краснодар-1.
Приведенные выше три типа датчиков имеют общие достоинства — необслуживаемость и надежность при работе в условиях эксплуатации стрелочного электропривода.
Применение указанных датчиков позволяет исключить характерные отказы типового ножевого АП стрелочного электропривода серии СП, сделать его необслуживаемым на весь срок эксплуатации. Применение приводов с указанными датчиками невозможно без привязки их к действующим схемам управления приводами или без разработки новых схем с контрольными цепями, отвечающими существующим требованиям безопасности для движения поездов.
В разделе 3 определена функциональная схема нового СПУ, в составе которого обязательными являются следующие функциональные узлы:
- перевода стрелки вручную (курбельной рукояткой);

- перевода стрелки дистанционно, с поста ЭЦ по электрическому кабелю с помощью схемы управления электродвигателем привода
- ограничения усилия перевода с помощью фрикционной муфты в редукторе электропривода;
- запирания остряков стрелки;
- контроля положения остряков;
- контроля запирания остряков;
- блок — контакты отключения электродвигателя от линейных проводов на время ручного перевода стрелки;
- внутренний замок крышки привода;
- соединения привода с остряками (тяги);
- крепления привода на стрелочном переводе.
По принципу построения в составе СПУ могут применяться электроприводы:
- — с внутренним запиранием шибера и контролем соответствия за-пирания и положения контрольных линеек (типа СП-6, ВСП-150), в которых ход шибера нормирован;
- — с внутренним запиранием шибера и контролем положения кон-трольных линеек и с внешним механическим замыкателем (типа СП-12У с ВЗ-7), где ход шибера так же нормирован;
- — с внутренним запиранием шибера (с винтовым самоблокирую¬щимся редуктором — ВСР) и внешним контролем положения остряков стрелки (два авто-номных контроллера). При этом привод не имеет кон¬трольных линеек, а ход шибера не нормирован;
- — с внутренним запиранием шибера (с ВСР и контролем положения контрольных линеек и с внешним замыкателем с электрическим контролем замы-кания (положения кляммеры), ход шибера не нормирован;
- — без внутреннего запирания и контроля, с внешними замыкате¬лями — контроллерами (ВЗК), без контрольных линеек, где ход шибера не нормирован;
6.- с внутренним запиранием без контроля запирания (с ВСР) и с внешним ВЗК, где ход шибера не нормирован.
Для реализации нового СПУ, который автоматически выбирает зазоры своей гарнитуры, варианты 1 и 2 приводов с нормированным ходом шибера не подходят.
Вариант 3 подходит для всех стрелок, где не требуется особые условия запирания остряков (как для высокоскоростного движения поездов). Требуемая надежность запирания в этом варианте обеспечивается прочностью гарнитуры. Изолирующих втулок в гарнитуре нет, кроме прокладки в соединении двух частей межостряковой тяги, поэтому зазоры могут возникать только в шарнирах гарнитуры по мере их износа.
Если внешний замыкатель обеспечивает надежное удержание прижатого и отведенного остряка при проходе поезда, то внутреннее запирание шибера в приводе можно не предусматривать. Но это возможно только с внешним замыкателем, который запирает остряк как в прижатом к рамному рельсу положении, так и в отведенном положении, т.е. обеспечивается двойное запирание через межостряковую тягу.
Если внешний замыкатель удерживает только прижатый остряк, а отведенный удерживается только межостряковой тягой, то при отказе, т.е. при ее отсоединении, отведенный остряк может уйти под составом в зону менее 125 мм, что опасно для движения поездов.
Наличие в приводе внутреннего контроля по вырезам двух контрольных линеек, как известно, защищает типовой СПУ от получения ложного контроля при обрыве межостряковой тяги. Но, при использовании автономных контрольных устройств, в таком контроле внутри привода, нет необходимости. При использовании ВЗК двух положений, с межостряковой тяги функция удержания отведенного остряка снимается.
В варианте 4 внешний замыкатель работает только при механической связи с приводом. Это усложняет регулировку СПУ, а наличие длинных тяг в шпальном ящике усложняет его эксплуатацию.
В варианте 5 осуществлено двойное запирание, а в варианте 6 — тройное:
прижатый остряк удерживает ВЗК-1;отведенный остряк удерживает ВЗК-2;
через межостряковую тягу каждый остряк дополнительно удерживается противоположным ВЗК и приводом с внутренним запирающим механизмом.
Поэтому в варианте 6 обеспечивается повышенная надежность СПУ. Исходя из выше сказанного, автор предлагает две новые модели СПУ.
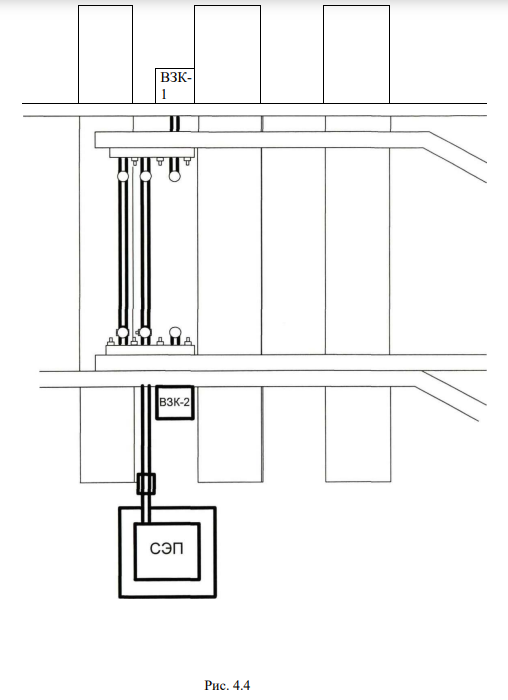
В состав первой модели СПУ повышенной надежности, входят (рис.4.4):
- электропривод (СЭП) с винтовым редуктором ВСР и ненормированным ходом шибера (200-250мм), установленный на отдельном бетонном основании;
- два внешних замыкателя — контроллера (ВЗК-1 и ВЗК-2) с тягами;
- одна рабочая тяга и две межостряковых тяги.
- два внешних замыкателя — контроллера (ВЗК-1 и ВЗК-2) с тягами;
В состав второй модели СПУ входят (рис.4.5):
- СЭП с ВСР, установленный на шпалах;
- два контроллера (КУ1 и КУ2), установленных на рамных рельсах;
- одна рабочая тяга привода и одна межостряковая тяга.
- два контроллера (КУ1 и КУ2), установленных на рамных рельсах;
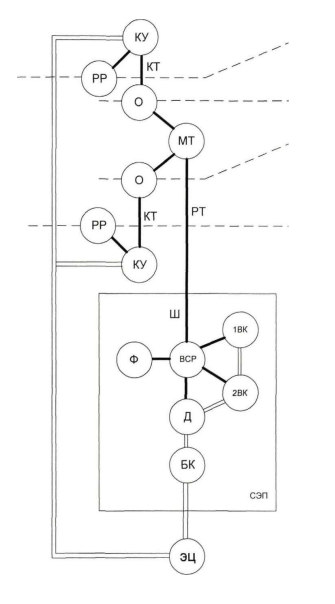
Принципиальная схема электропривода нового СПУ изображена на рис.4.6 и состоит из: электродвигателя (Д) с двухсторонним выходом вала для возможности ручного перевода, винтового редуктора с самоблокировкой (ВСР), фрикционной муфты (Ф), шибера (Ш), защитных блок — контактов (БК) и ограничителей (ВК1 и ВК2) максимального хода винта редуктора.
Д, Ф, ВСР, Ш, ВК1 и ВК2 объединены в единое устройство, которое называется линейным приводом (ЛП) или актуатором и изготавливается отечественной промышленностью.
Особенностью линейного привода является то, что он компактный (вес 5-7 кг), не требует обслуживания, имеет высокий КПД и герметичный редуктор. Резьба винта трапецеидальная, которая обеспечивает статическую самоблокировку, т.е. после отключения питания на электродвигателе винт останавливается и удерживает шибер, препятствуя его обратному ходу (аналог — винтовой домкрат).
Применение винтового самотормозящего редуктора в стрелочном электроприводе в качестве механизма перемещения рабочего шибера позво- ляет^во-первых, осуществлять надежное без заклинивания запирание остряков стрелки в любой точке их перемещения, чем обеспечивается автоматическая выборка всех зазоров в гарнитуре, возникающих в процессе эксплуатации, во-вторых, облегчить обслуживание редуктора и привода в целом, в- третьих, уменьшить массу СЭП, что наилучшим образом влияет на способ крепления привода.
Использование винтового привода требует разработки и применения надежных контрольных устройств КУ (контроллеров), которые устанавливаются на рамных рельсах, связаны с остряками короткими контрольными тягами и контролируют фактическое положение остряков относительно рамных рельсов.
Новые устройства запирания и контроля
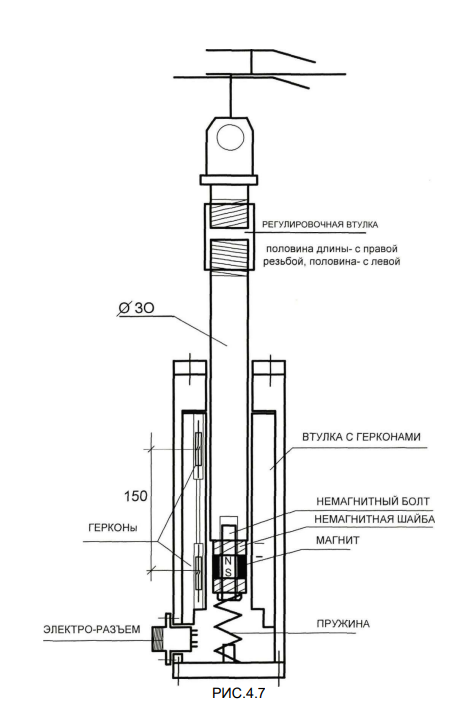
Принципиальная схема контроллера, предлагаемого автором, представлена на рис.4.7. За основу крепления контроллера (КУ) к рамному рельсу взята конструкция внешнего замыкателя ВЗ — 7, т.е. крепление КУ к рамному рельсу с помощью крюк — болтов. Аналогично крепится серьга к подошве остряка.
Пружина контроллера стремиться вытолкнуть тягу (вывести в неконтрольное положение) из контроллера, чем обеспечивается защита от получения ложного контроля при вероятном обрыве тяги от остряка или при отсоединении контроллера для замены или ремонта. На той части тяги, что находится внутри контроллера, установлен постоянный магнит, который взаимодействует с магнитоуправляемыми контактами (герконами). Один контакт включается когда остряк прижат, второй контакт включается, когда остряк отведен от рамного рельса на нормативное расстояние (более 125мм). Контакты не обслуживаются и устойчиво работают в условиях железнодорожной эксплуатации по ОСТ 32- 146.
Все устройство защищено от внешних магнитных полей и герметично. Ввод проводов также герметичен. От контроллера до кабельной муфты провода проложены в металлическом защитном шланге. Контроллер крепится к рамному рельсу и остряку без сверления в шейке рельса отверстий, поэтому может быть установлен в любом месте стрелочного перевода. Длина тяги регулируется поворотом регулировочной муфты. Включение контрольного контакта фиксирует светодиод.
Принципиальная схема внешнего замыкателя — контроллера (ВЗК) представлена на рис.4.8.
ВЗК состоит из:
- корпуса, который крепится к рамному рельсу крюк — болтами (как и внешний замыкатель ВЗ-7);
- тяги, которая соединяет ВЗК с остряком. Соединение шкворневое.
Внутри корпуса ВЗК находятся:
- соленоид (С), который управляет запирающими ригелями;
- ригель прижатого положения остряка (РП);
- ригель отведенного положения остряка (РО);
- пружина РП;
- пружина РО;
- постоянный магнит, установленный на РП;
- постоянный магнит, установленный на РО;
- магнитоуправляемый контакт контроля прижатия остряка (КП);
- магнитоуправляемый контакт контроля отведения остряка (КО);
- запираемая тяга (ЗТ).
На тяге ЗТ есть вырез, куда западает запирающий ригель под действием пружины. Если ригель РП находится в вырезе, значит тяга заперта и остряк плотно прижат к рамному рельсу с зазором менее 4 мм. Если ригель РО находится в вырезе, значит остряк отведен на нормативное расстояние (более 125мм) и тяга заперта.
Положение ригелей контролируют герконы, которые включаются, когда остряк заперт и ригель находится в вырезе тяги. На рис.4.3.2 изображено положение отведенного остряка.
ВЗК работает следующим образом: при кратковременной подаче напряжения по управляющей цепи на обмотку, соленоид втягивает свой якорь и вытаскивает из выреза тяги ригель, запирание снимается и тяга может свободно перемешаться вслед за остряком. По окончании перевода стрелки вырез тяги подходит ко второму ригелю — РП, который под действием пружины западает в вырез. Это означает, что остряк плотно прижат к рамному рельсу и заперт.
При этом включается контакт контроля прижатия и запирания остряка — КП, по контрольной цепи включается контрольное реле положения стрелки и отключается электродвигатель привода. Подробнее о схеме управления будет изложено ниже.
Для обеспечения постоянного плотного, без зазоров, прижатия остряка к рамному рельсу и симметричной реакции гарнитуры на взрез стрелки автором предлагается устройство (УЗ), которое представлено на рис.4.9.
УЗ является составной частью рабочей тяги и по форме напоминает подкову. Когда остряк упрется в рамный рельс, УЗ изгибается под действием усилия привода. После остановки, привод через УЗ препятствуют обратному ходу остряка и продолжают с небольшим (2 кН) усилием прижимать остряк к рамному рельсу. Таким образом, УЗ совместно с рабочей тягой работают как пружина на сжатие, тем самым обеспечивают плотное прижатие остряка к рамному рельсу во время прохода поезда. При динамическом упругом уши- рении колеи УЗ работает как жесткая пружина при растяжении.
При взрезе, когда усилие передаваемое от остряков значительно превышает усилие перевода и удержания остряка, УЗ деформируется и остается в этом состоянии, т. е. механически запоминает взрез.
Типовая гарнитура привода СП-6 обладает небольшим пружинящим свойством, что защищает узел запирания от жесткого воздействия со стороны остряка при его отбое во время прохождения колеса поезда. Это является положительным свойством гарнитуры. Однако реакция гарнитуры (рабочей и межостряковой тяг) на взрез не симметричная, что является ее недостатком и, при вытягивании шибера во время взреза стрелки, приводит к поломке привода и возможен ложный контроль.
Предложенное устройство УЗ решает эти две задачи:
- симметрично, относительно привода, запоминает взрез,
- за счет пружинящих свойств обеспечивает плотное прижатие остряка к рамному рельсу во время прохода поезда.
Одной из важных и сложных технических задач является контроль отказа в виде обрыва элемента силовой цепи «СЭП- рабочие тяги — остряки» в статическом режиме работы применяемого в настоящее время СПУ. Отказы в виде излома и выпадения болтов из шарнирных соединений или излома серег остряков, которые произошли из-за динамических нагрузок от проходящих поездов, можно проконтролировать в СПУ, по мнению автора, применением тензометрического датчика силы, включенного последовательно в силовую цепь СПУ.
Такой контроль возможен потому, что соединительная гарнитура привода СП-6 в статическом режиме находится в подпружиненном состоянии за счет небольшого изгиба рабочей тяги, возникающего после нормального перевода остряков и упоре одного из них о рамный рельс. Поэтому тен- зодатчик, находясь в напряжении, выдает в электрическую контрольную цепь сигнал, соответствующий нормальному состоянию СПУ.
При обрыве в силовой цепи величина напряжения уменьшается, на что тензодатчик реагирует изменением своего электрического сопротивления в контрольной цепи, эта информация передается на пост ЭЦ.
При взрезе величина напряжения в силовой цепи во много раз превышает напряжения нормального, в том числе и при работе привода на фрикцию, поэтому с помощью тензодатчика можно контролировать и взрез стрелки. Такая информация крайне важна для своевременного устранения отказа, который может привести к сходу поезда.
Кроме сказанного, имея установленный в соединительной гарнитуре тензодатчик, можно постоянно контролировать усилия перевода стрелки с поста ЭЦ.
Выводы
- Модернизация применяемых в настоящее время на РЖД электро-приводов серии СП заключается прежде всего в замене контактного блока АП на бесконтактный необслуживаемый, а также замене курбельных контак¬тов.
- Новое стрелочное переводное устройство, как элемент железнодо-рожной автоматики, обеспечивающий безопасное движение поездов по стрелке с растущими скоростями и тоннажем, должно состоять из общепри¬нятых функцио-нальных узлов, но в новой компановке на стрелочном перево¬де и по новым взаи-мосвязям.
- Устройство контроля прижатия остряка к рамному рельсу должно быть автономным, устанавливаться на рамном рельсе и соединяться с бли¬жайшим ост-ряком короткой тягой, чем обеспечивается достоверность кон¬троля, при этом от-падает необходимость частых регулировок. Электриче¬ский элемент устройства, включенный в цепь дистанционного контроля, должен быть необслуживаемым и способным работать в жестких напольных условиях эксплуатации. Наиболее под-ходящими, являются датчики с герме¬тизированными магнитоуправляемыми кон-тактами.
- Устройство запирания остряка (ов) может находиться в электро¬приводе или устанавливаться вне его, как внешний замыкатель, но с обяза¬тельным элек-трическим контролем запирания. Целесообразно объединить внешний автоном-ный (без механической связи с приводом) замыкатель с устройством контроля в едином корпусе.
Если в электроприводе использован винтовой механизм с самоблоки-ровкой, т.е. с запиранием в любой точке хода шибера после остановки элек-тродвигателя, то контролировать запирание в приводе не надо. - Устройство перевода остряков должно иметь ненормированный ход шибера, а остановку электродвигателя должны осуществлять устройства, следя-щие за фактическим перемещением остряков, т. е автономные устрой¬ства кон-троля (контроллеры). Этим обеспечивается автоматическая регули¬ровка зазоров СПУ при очередном переводе стрелки .При разработке нового стрелочного элек-тропривода можно применить готовое техническое решение в виде законченного промышленного изделия — механизма линейного пере¬мещения (актуатора), в ко-тором технические характеристики соответствуют характеристикам стрелочных электроприводов.
Список литературы
- Вагоны. Учебник для вузов ж.-д. трансп. / Шадур Л.А., Челноков И.И., Никольский E.H., Никольский Л.Н., Котуранов В.Н., Проскурнев П.Г., Казанский Г.А., Спиваковский А.Л., Девятков В.Ф.; Под ред. Шадура Л.А. — 3-е изд., перераб. и доп. -М.: Транспорт, 1985. — С. 5-51.
- Нормы технологического проектирования устройств автоматики и телемеханики на федеральном железнодорожном транспорте. / Дмитриев В.Р., Крупицкий А.З., Петров А.Ф., Прокопин Ю.Д., Ушкалов А.И. НТП СЦБ/МПС-99. — 1999, ГУП Гипротранссигналсвязь, — 76 с.
- Глюзберг Б.Э. Стрелочные переводы нового поколения для железных дорог России // Проблемы железнодорожного транспорта и транспортного строительства: Сборник научных трудов.- Новосибирск: ВНИИЖТ, 1997. С. 21-24 c.
- Басилов В.В., Чернышов М.А. Справочник инженера-путейца. Т.1 — М.: Транспорт, — 1972. — 768 с.
- Гниломедов В.В. и др. Исследование влияния взреза на элементы электропривода и стрелочную гарнитуру. Отчет по НИР. ЛИИЖТ. — 1983. -89 с.
- Талалаев В.И., Сараев В.В., Минаков Е.Ю., Шуваев В.В. Анализ динамики взреза стрелки с невзрезными стрелочными электроприводами серии СП и ВСП-150. // Автоматика, связь, информатика № 3, — 2001. — С. 11-14.
- Фришман М.А. Как работает путь под поездами. -М.: Транспорт, — 1983. -136 с.
- Федотов А.Е., Качмарская O.K. Техническое обслуживание централизованных стрелок. — М.: Транспорт, — 1988. — 95 с.
iv. Шуваев В.В. Современные методы защиты стрелочного перевода от ложного контроля. РГОТУПС РФ. -М., 2002. 9 е., библиограф. 4 назв., 2 ил., (рукопись депонирована в ВИНИТИ 10.10.2002, № 1833 — В2002). - Резников Ю.М. Усовершенствованные устройства управления централизованными стрелками. — М.: ВЗИИТ, — 1979. — 26 с.
- Талалаев В.И., Сараев В.В., Минаков Е.Ю., Шуваев В.В. Обеспечение безопасности движения поездов контрольной системой электропривода ВСП-150. // Автоматика, связь, информатика № 4, — 2001. — С. 11-14.
- Каргалов Н.И. и др. Работа устройств ЭЦ с электроприводом переменного тока. // Автоматика, телемеханика и связь, — 1975. №10, — С. 22-24.
- Инструкция по обеспечению безопасности движения поездов при производстве работ по техническому обслуживанию и ремонту устройств СЦБ. № ЦШ-530. — 1998. — 97 с.
- Разработка стрелочных электроприводов на новой элементной базе. Научно-исследовательская работа. — М.: РГОТУПС, — 1998. — 37 с.
- Резников Ю.М. Структурный синтез бесконтактного стрелочного электропривода для систем централизации с учетом требований технической диагностики. Сб. трудов ВЗИИТа, вып. 93, — 1978. — С. 32-40.