Цикл статей:
Глава 1 – Устройства обеспечения безопасности движения поездов по железнодорожным стрелкамГлава 2 – Анализ структуры и режимов работы стрелочных переводных устройств(СПУ)
Глава 3 – Синтез СПУ нового поколения
Глава 4 –Совершенствование элементов СПУ
Требования к схемам управления
Электрическая схема управления и контроля СПУ (далее — схема) относится к числу наиболее ответственных в системах ЭЦ.
Схема должна обеспечивать: включение и отключение электродвигателя привода (перевод стрелки); контроль фактического положения стрелки; контроль запирания стрелки; контроль аварийного взреза стрелки; исключение дистанционного (с поста ЭЦ) управления приводом во время ручного перевода стрелки /18/.
Для реализации указанных требований схема содержит комплект аппаратуры, состоящей из двух частей, одна из которых находится на посту ЭЦ и содержит: источник электропитания, устройства управления электродвигателем привода (пусковые реле) и устройства (контрольные реле), считывающие информацию от напольных устройств контроля положения стрелки. Вторая часть схемы находится на поле и содержит: электродвигатель привода, электрическое контрольное устройство (например, АП), передающее на пост ЭЦ информацию о фактическом положении и запирании стрелки. Связь между полем и постом осуществляется по электрическому кабелю.
Постовая часть схемы состоит из трех электрических цепей:
- восприятия команды на перевод стрелки и проверки безопасности перевода в данный момент времени;
- рабочей- коммутации электродвигателя;
- контрольной- фиксации фактического перевода и взреза стрелки.
Напольная часть схемы состоит из двух цепей: рабочей и контрольной.
С целью экономии кабеля допускается совмещение рабочей и контрольной цепей по общим линейным проводам.
Включение и реверсирование электродвигателя привода осуществляет постовая пусковая аппаратура (релейная или бесконтактная). Команда на перевод стрелки исходит от ЭЦ (при задании маршрута или от индивидуальных кнопок стрелки с пульта дежурного по станции) с обязательной проверкой безопасности перевода в данный момент. Это означает, что пуск электродвигателя возможен лишь тогда, когда стрелочный путевой участок, на котором находится стрелка, свободен от подвижного состава и не задействован в другом маршруте.
Отключение электродвигателя может осуществляться следующими способами:
- на поле — в электроприводе внутренним КУ (в приводе СП-6 — рабочими контактами АП или их повторителем- контактором),
- на поле — внешними (относительно привода) КУ, установленными на каждом рамном рельсе,
- на посту ЭЦ — пусковыми устройствами, после срабатывания в электроприводе внутреннего КУ (контрольных контактов АП)
- на посту ЭЦ — пусковыми устройствами, после срабатывания внешнего напольного КУ,
- на посту ЭЦ — пусковыми устройствами, после нормированной выдержки времени, отсчет которой начинается с момента пуска электродвигателя.
Передача информации с поля от КУ на пост ЭЦ может осуществляться по кабелю тремя способами:
- по отдельным контрольным линейным проводам;
- по рабочим проводам электродвигателя, т. е. по тем же проводам;
- по отдельным проводам, по которым передается также управление напольным контактором, включающим и отключающим электродвигатель привода.
На российских железных дорогах в ЭЦ применяются сейчас в основном две схемы управления (способ 2):
- двухпроводная для приводов с электродвигателями постоянного тока;
- пятипроводная для приводов с электродвигателями трехфазного тока.
Первая применяется с 1955 года в ранее построенных системах ЭЦ. При реконструкции и новом строительстве с 1976 года используется 5 — проводная схема переменного тока. Однако эта схема имеет недостатки, связанные прежде всего с большим количеством контактов АП используемых для коммутации рабочей цепи электродвигателя и для организации контрольной цепи, что усложняет обслуживание и поиск возможных отказов, особенно в схеме управления спаренными приводами. Кроме этого схема не экономична по расходу кабеля, т. к. во время включения электродвигателя для перевода стрелки используются только три из пяти проводов.
В 5-проводной схеме не размыкание контрольного контакта АП не контролируется. Это приводит к тому, что в конце очередного перевода, после срабатывания рабочих и контрольных контактов АП по обходной цепи обмотка двигателя остается подключенной к источнику питания, от источника питания отключается только одна обмотка электродвигателя, фазокон- трольный блок, который создает напряжение блокировки при наличии трех фаз, снимает блокировку с обмотки пускового реле НПС и оно своими контактами отключает электродвигатель, т. е. двигатель привода отключается не рабочими контактами АП, а контактами постового реле, которое не предназначено для отключения силовых цепей электродвигателей (по техническим характеристикам). Контакты реле НПС при этом искрят и отказывают.
Таким образом, неконтролируемый отказ на поле в виде короткого замыкания контрольного контакта АП привода в 5-проводной схеме приводит к отказу постового реле. Кроме этого не отключение двух обмоток может привести к развороту асинхронного электродвигателя и отведению приводом остряка от рамного рельса, т. е. к потере контроля.
Принципы построения контрольных и рабочих цепей схем управления СПУ
Построение схемы зависит, прежде всего, от применяемых в приводе: электродвигателя , элементов коммутации электродвигателя (рабочая цепь) и контрольной цепи.
Подавляющее большинство стрелок на сети дорог оборудуются для перевода одним электроприводом. На стрелочных переводах с подвижным сердечником крестовины используются два электропривода: один для перевода крестовины, второй — для перевода остряков. На стрелочных переводах высокоскоростных участков применяются два привода для перевода и запирания крестовины и два — для остряков /18/.
В ЭЦ на стрелочных съездах применяются спаренные электроприводы. Это означает, что после перевода двух стрелок съезда контрольная цепь схемы управления проходит через последовательно включенные контрольные контакты АП обоих приводов и, при совпадении замыкания одноименных контрольных контактов, на посту будет получен контроль положения съезда в целом. Перевод двух стрелок съезда может быть при этом последовательный или одновременный.
Перевод и получение контроля стрелки с подвижным сердечником крестовины аналогичен переводу съезда, т. к. перевод крестовины и остряков допускается как одновременный, так и раздельный.
Учитывая то, что трехфазный асинхронный двигатель с короткозамкнутым ротором более надежен в эксплуатации по сравнению с двигателем постоянного тока с последовательным возбуждением, далее рассматриваются только схемы с трехфазным электродвигателем.
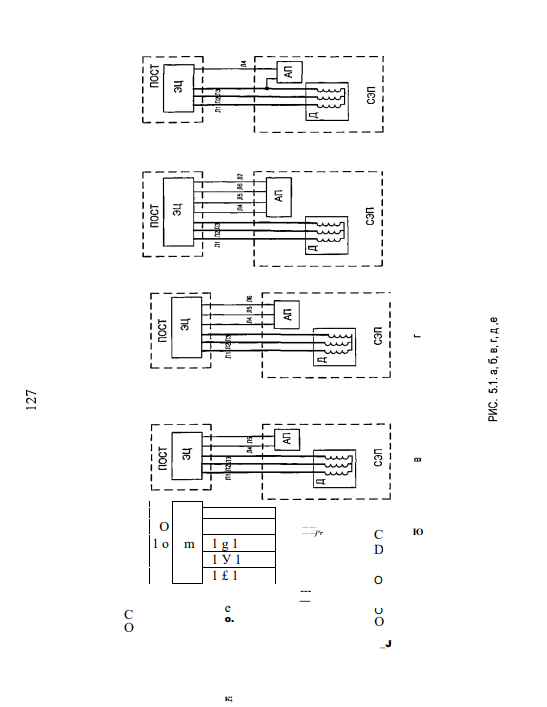
Известные функциональные схемы рабочих и контрольных цепей электропривода приведены на рис.5.1 а, б, в, г, д, е.
На рис.5.1,а — 3-проводная схема с напольным фазоконтрольным реверсирующим устройством (ФР).
На рис.5.1,6 — 5-проводная типовая схема с отключением двигателя в СЭП контактами АП и с совмещением контрольной и рабочей цепей в общих линейных проводах.
На рис.5.1. в — 5-проводная схема с отключением Д (провода Л 1,Л2, ЛЗ) пусковой аппаратурой поста ЭЦ и независимой 2-проводной контрольной цепью (Л4 и Л5).
На рис.5.1.г — 6-проводная схема, из которых 3 рабочих и 3 контрольных.
На рис.5.1. д — 7-проводная схема с отключением Д (провода Л1,Л2, ЛЗ) пусковой аппаратурой поста ЭЦ и независимой 4-проводной контрольной цепью (Л4,Л5,Л6 и Л7).
На рис.5.1.е — 4-проводная схема с отключением Д (провода Л1,Л2, ЛЗ) пусковой аппаратурой поста ЭЦ и 2-проводной контрольной цепью (ЛЗ и Л4), причем один из контрольных проводов совмещен с рабочим-провод ЛЗ.
Несомненное преимущество схем 5.1.а и б перед остальными состоит в возможности последовательного перевода спаренных стрелок по тем же линейным проводам. Но это достигается в приводах СП ценой использования малонадежных контактов АП или размещением на поле в путевом ящике (ПЯ) дополнительных устройств (рис.5.1.а — ФР), требующих обслуживания и находящихся в сложных условиях напольной эксплуатации. Такие схемы с большим числом коммутационных датчиков и соединений между элементами схемы значительно затрудняют обслуживание и поиск отказа в напольных условиях эксплуатации.
Поэтому, далее рассмотрим варианты в, г, д, е. Надо учесть также, что в зарубежных схемах чаще всего используется схема соответствующая рисунку 5.1, д.
В контрольной цепи на рис.5.1в использован модулированный частотный сигнал для плюсового и другой частоты для минусового положения стрелки. Такой принцип позволяет передать информацию о положении стрелки по двум проводам, однако, первоисточником информации остается датчик КУ СПУ и от его безотказности зависит работа всей контрольной цепи. Недостатком этой схемы является и то, что на поле должны быть размещены электронные элементы, работа которых в напольных условиях эксплуатации до конца не исследованы.
По двум линейным проводам можно организовать и известную типовую вентильную контрольную цепь, которая имеет хорошую защищенность от получения ложного контроля при отказе одного из контрольных датчиков, при этом датчики могут быть герконовые, резистивные и индуктивные электронные. Однако в схеме на посту ЭЦ необходимо обеспечить защиту от случайных перепутывании линейных контрольных проводов. Это достигается включением тыловых контактов контрольных реле в цепь команды на перевод.
В схеме по рис.5.1 г — три контрольных линейных провода и три рабочих. Контрольная цепь может быть построена лишь при использовании в КУ микропереключателей с мостовым способом замыкания и размыкания контактов, в которых при замыкании одной пары контактов, гарантированно разомкнута вторая пара контактов.
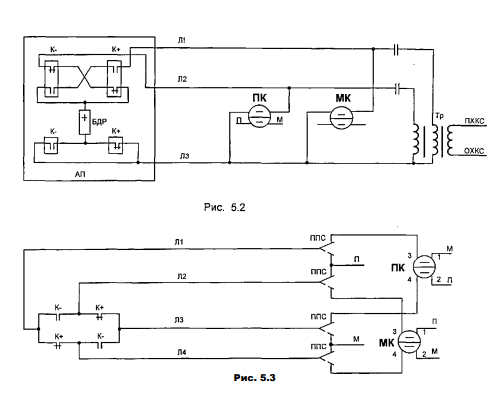
Схема 3-проводной контрольной цепи, разработанная автором, приведена на рисунке 5.2. В этой схеме вторичные обмотки трансформатора включены последовательно для контроля короткого замыкания проводов Л1 и Л2.
В схеме рис.5.1. д — три рабочих и четыре контрольных линейных провода.
Четырех — проводная контрольная цепь, разработанная автором, приведена на рис.5.3, причем в КУ могут быть использованы контактные (в том числе герконовые) и резистивные датчики.
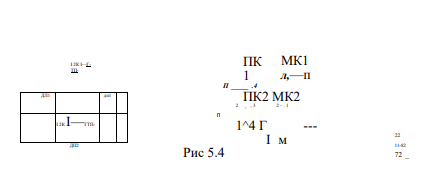
На рис. 5.4. представлена вторая четырех-проводная контрольная цепь, разработанная автором и рассчитанная на применение в КУ электронных бесконтактных индукционных датчиков.
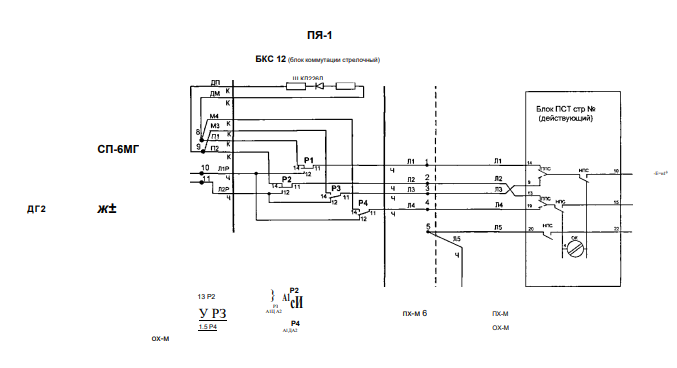
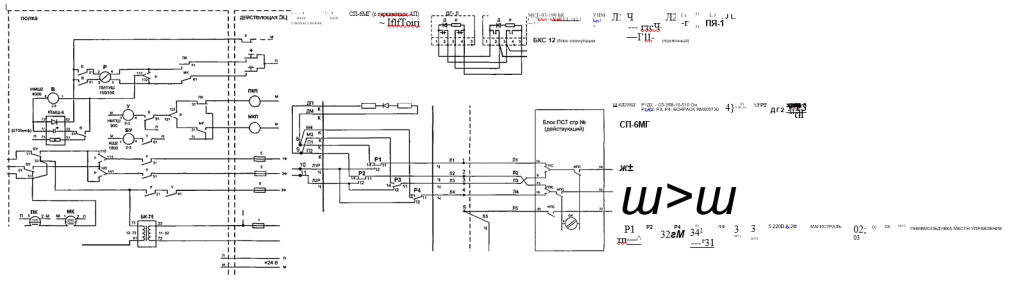
На рис.5.5 приведена третья разработанная автором 4-проводная контрольная цепь с магистральным (или индивидуальным) питанием бесконтактных трансформаторных датчиков КУ привода СП-6МТ.
В представленных на рисунках 5.2- 5.4 трех контрольных цепях в качестве контрольных реле ПК и МК используются нейтральные реле с полярной избирательностью типа ПЛЗУ 2700/4500 /45/.
Для того чтобы распознать какое положение занимает стрелка, в КУ должна быть предусмотрена электромеханическая система, постоянно следящая за положением каждого остряка относительно рамного рельса (в приводах серии СП — это контрольные линейки).
Как уже было сказано в п.4.2, наиболее подходящими являются КУ, установленные на каждом рамном рельсе и физически связанные со своим, остряком короткой тягой. Только в этом виде будет достоверная информация о положении стрелки. Но эта информация механическая, основанная на сравнении взаимоположения подвижного (тяги) и неподвижного (корпуса) элемента КУ. Решающее значение имеет электрический контрольный элемент (датчик), который воспринимает эту механическую информацию, фиксирует ее, преобразует и по схеме передает на пост ЭЦ.
Принцип работы всех схем с независимой контрольной цепью заключается в том, что отключение электродвигателя привода происходит после срабатывания контактов (датчиков) АП привода или автономных КУ и, затем, включения на посту ЭЦ контрольных реле, которые своими тыловыми контактами отключают от источника питания силовое управляющее двигателем реле.
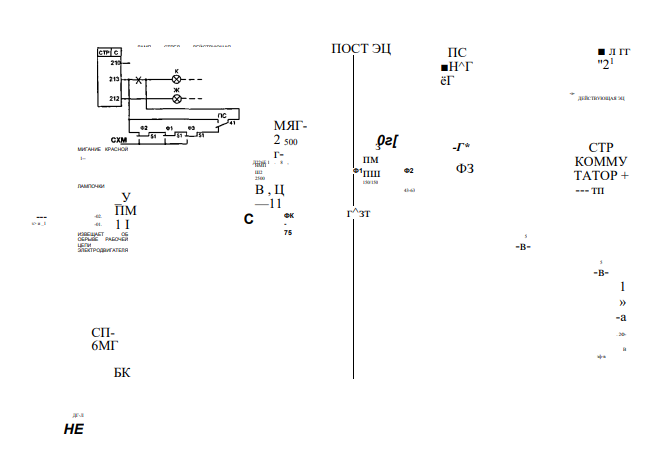
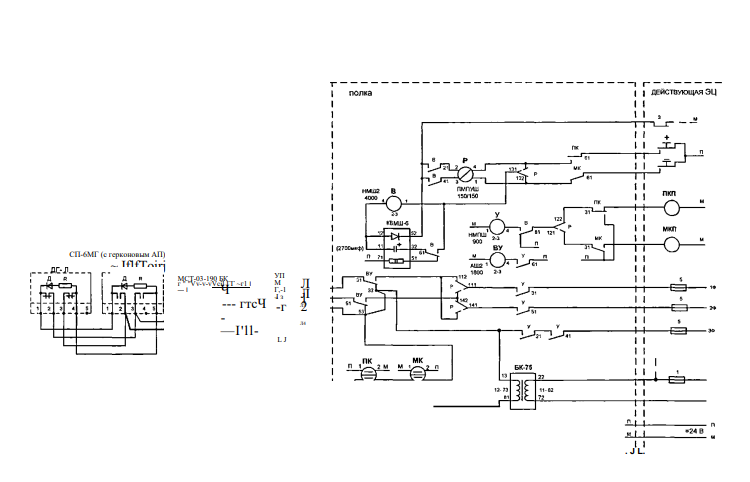
Отсутствие контактов АП и других коммутационных устройств в рабочей цепи позволяет организовать постоянный контроль исправности цепи электродвигателя (в применяемой сейчас 5-проводной схеме такого нет). Это помогает электромеханику вовремя обнаружить (по сработавшей сигнализации) и устранить отказ до очередного перевода стрелки. Разработанная схема управления электродвигателем привода СП-6МГ с контролем рабочей цепи представлена на рисунке 5.6.
На рис.5.7 представлена схема управления электроприводом СП-6МГ или СП-12УГ с АП на базе герконовых датчиков. Схема 4-проводная, причем контрольная цепь проходит по контрольному проводу Л4 и рабочему — ЛЗ. К достоинствам схемы относится: малое число линейных проводов, необслуживаемый АП привода, отключение электропривода при длительной работы на фрикцию.
Обе 4-проводные схемы защищены от получения ложного контроля при перепутывании линейных проводов Л4 и Л3(или Л2,или Л1) тем, что, в этом случае, низкоомные обмотки электродвигателя оказываются включенными параллельно высокоомным обмоткам контрольных реле.
Общим недостатком схем с рабочей цепью без контактов АП и независимой контрольной цепью является то, что для перевода спаренных приводов требуется в два раза больше кабеля. Каждая стрелка при этом рассматривается как одиночная.
Общее достоинство — малое количество контактов АП и межэлементных соединений находящихся на поле, что значительно облегчает работу электромехаников при подключениях, измерениях и поиске отказа.
На рис.5.8 представлена типовая 5-проводная схема управления электроприводом с двигателем переменного тока, позволяющая использовать АП с датчиками любого контактного или бесконтактного типа. Увязка электропривода обеспечивается коммутационным блоком на электромеханических реле промышленного назначения, при этом аппаратурных и монтажных изменений на посту ЭЦ не требуется. Данная схема позволяет заменить все действующие на сети РЖД электроприводы с ножевыми контактами АП на бесконтактные электроприводы.

Схемы управления электроприводами высокоскоростных стрелок
Схемы управления электроприводами стрелок ( Р65 — 1/11 проект 2956) на высокоскоростных участках (например, станций Торбино и Боро- венка Окт. ж.д.) отличаются от представленных выше. Это объясняется тем, что на этих стрелочных переводах устанавливаются два привода типа В СП на подвижном сердечнике крестовины и столько же на остряках.
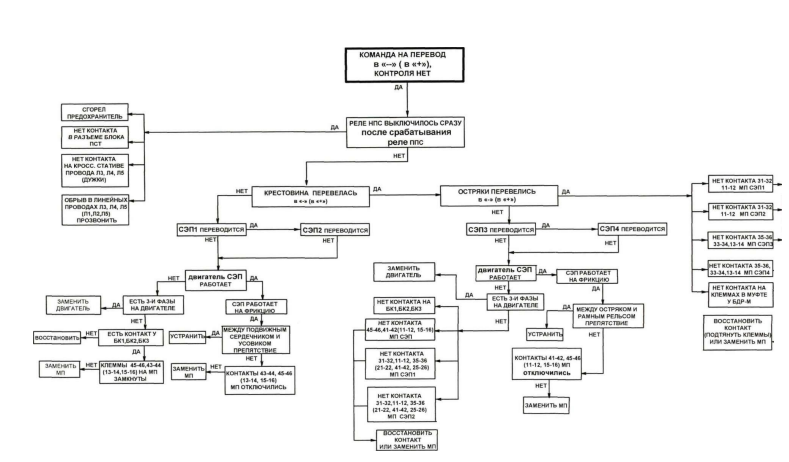
Работа приводов при этом параллельно — последовательная, т. е. сначала одновременно переводятся два привода крестовины, затем, после их остановки и получения контроля, одновременно переводятся два привода остряков. Кроме этого необходимо индивидуальное отключение каждого привода сразу по окончании перевода. Для реализации такого алгоритма используется 9-проводная схема и задействовано в каждом приводе типа В СП 16 контактов АП (по 8 микропереключателей). Автором разработана методика и алгоритм поиска отказов для этой схемы, включенной сейчас в опытную эксплуатацию. Алгоритм приведен на рис.5.9.
Схема сложная для анализа и поиска отказа, с большим количеством межэлементных соединений. Применение же схем с независимой рабочей и контрольной цепями для этого случая нецелесообразно из-за большого расхода кабеля.
Поэтому автором разработана новая схема (рис.5.10), позволяющая параллельно-последовательно управлять любым количеством приводов по 5-проводной типовой схеме. Постовая часть схемы на рисунке не показана, т. к. она типовая.
Особенностью схемы является то, что на поле в приводе (или в путевом ящике) устанавливается коммутационный блок из двух электромагнит ных промышленных реле (на рисунке — ПУ, МУ), которые предназначены для коммутации асинхронных промышленных электродвигателей. Коммутационный блок (контактор) не обслуживается и по техническим характеристикам подходит к требуемым на ж/д условиям эксплуатации.
Обмоткой реле управляют рабочие контакты АП привода, то есть контактор является повторителем рабочих контактов АП.
Обмотки контакторов не влияют на работу контрольной цепи, т. к. они подключены к линейному проводу Л5, не связанному с контрольной цепью.
Для работы схемы, в АП должны быть установлены по два микропереключателя во всех приводах ВСП.
Достоинства схемы состоят в следующем:
- в каждом приводе используется два микропереключателя;
- при необходимости увеличения количества приводов (для стрелочных переводов марок 1/22, 1/42), постовая часть схемы остается без изменений и число линейных проводов не изменяется.
Схема разработана для стрелок высокоскоростных магистралей, но может быть использована на любых участках железных дорог для перевода как спаренных, так и одиночных стрелок.
Элементная база для контрольных цепей схем управления электроприводами
Модернизация схемы управления, чаще всего, в настоящее время, направлена на замену элементной базы постовой аппаратуры с релейной на бесконтактную. При этом новые схемы увязываются с применяемыми сейчас на РЖД электроприводами с ножевыми АП.
Но именно напольная часть схемы управления имеет наибольший процент отказов. Поэтому автором анализируется элементная база, которая может быть применена для напольных части схемы управления, как для действующих приводов, так и для нового СПУ.
На основании выбранной элементной базы, подходящей к условиям железнодорожной напольной эксплуатации, могут строиться новые схемы управления, возможно отличающиеся от типовых или уже разработанных в настоящее время.
Выше были представлены различные схемы построения контрольных и рабочих цепей и выяснено, что для российских условий ж/д эксплуатации лучшими является схемы, в которых нет или минимальное количество напольных коммутационных устройств.
Очевидно, что для передачи на пост ЭЦ информации о положении стрелки и ее запирании необходимы датчики контроля. Причем эти датчики должны быть необслуживаемые и способные работать в условиях напольной эксплуатации. Если не жалеть кабель и отказаться от коммутации электродвигателя непосредственно в приводе, то двух таких датчиков каждого положения стрелки достаточно для построения схемы управления приводом.
Так как абсолютно надежных и безотказных контрольных датчиков не существует, схема должна контролировать даже маловероятные отказы используемого датчика.
При размещении КУ вне электропривода необходимо иметь также контроль запирания остряков стрелки приводом или другим запирающим устройством. При этом, чтобы не получить контроль незапертой стрелки, необходимо соблюдать обязательный алгоритм. То есть, в начале перевода стрелки перед снятием механического запирания и движением шибера должна быть отключена контрольная цепь схемы, а по окончании перевода, сначала стрелка должна быть механически заперта с электрическим подтверждением (контрольным датчиком) запирания, и только затем может быть образована контрольная цепь схемы.
Датчики КУ настроены на отключение (не включение) контрольной цепи при не доходе прижатого остряка до рамного рельса на 4мм и более.
При выбранной в разделе 4 конструкции нового СПУ с самоблокирующимся винтовым редуктором, где запирание происходит в любой точке хода шибера, установка датчиков контроля запирания не требуется, что упрощает построение схемы управления приводом.
В данном разделе поставлена задача исследовать промышленные датчики пригодные для использования в стрелочном электроприводе, в автономных контрольных и запирающих устройствах.
Проведенные автором исследования по конструкциям, элементной базе, области применения, условиям эксплуатации различных датчиков позволили сделать вывод, что наиболее подходящими для применения в качестве контрольных датчиков являются: датчик на основе дифференциального трансформатора, датчик на основе переменного резистора и датчик на основе магнитоуправляемого герметизированного контакта.
Герметизированные магнитоуправляемые контакты (герконы) в настоящее время остаются одним из основных элементов коммутационной техники.
То, что объемы производства геркоиов в мире не снижаются, связано с рядом их неоспоримых качеств:
- полностью герметизированный металлический контакт, в связи с чем герконы могут работать в условиях повышенной влажности и запыленности, в агрессивных средах, при температурах от — 60°С до +150°С;
- малая мощность управления (50 — 200 мВт);
- низкое электрическое сопротивление (0,05 — 0,2 Ом);
- высокое сопротивление изоляции (1010- 1012 Ом);
- быстродействие (0,5 — 1,5 мс);
- полная гальваническая развязка цепей управления и нагрузок;
- большой срок службы (106 — 108 переключений);
- высокая механическая устойчивость (ударные нагрузки до 500 g, вибрация в диапазоне частот до 3000 Гц при 15-20 g).
Ведущими производителями герконов на мировом рынке являются фирмы OKI (Япония), Hamlin (США), Standex (Великобритания), Philips, С.Р. Clare, Fujitsu (Япония), Gunther (Германия), Aleph Nippon (Япония). Единственный производитель герконов в России и странах СНГ — Рязанский завод металлокерамических приборов (РЗМКП).
Свойства герконов и простота их конструкции, возможность управления ими посредством магнитных полей, созданных электрическим током и постоянным магнитом, позволяет применять их в реле, концевых выключателях, кнопках, датчиках положения, скорости и ускорения, элементах измерительной аппаратуры и т. д.
Общий объем продаж герконов на мировом рынке составляет 1 млрд. шт. в год. Потребность в них стабильно растет: от 10% до 15% ежегодно.
Рост объема продаж герконов связан как с увеличением производства уже выпускаемых изделий на их основе, так и с появлением новых. В первую очередь, это относится к реле и датчикам.
Особенность свойств герконов делает их практически незаменимыми в ряде областей техники. По совокупности свойств и уровню цен герконовые реле и датчики превосходят полупроводниковые аналоги, в результате этого наблюдается обратный переход от полупроводниковых устройств к устройствам на герконах.
Герконы использованы автором при разработке нового АП для серийных электроприводов типа СП. На рисунке 5.11 представлен датчик нового привода СП-6МГ.

Все электронные компоненты делятся на два класса активные и пассивные. К классу пассивных относятся переменные резисторы и на их основе резистивные датчики. В современных датчиках проводящая дорожка выполнена из искусственного материала как элементов сопротивления. Эта современная технология используется прежде всего в одновитковых переменных резисторах. Преимущества этих резисторов: очень высокий срок эксплуатации, практически бесконечная разрешающая способность, высокая устойчивость к ударным и вибрационным нагрузкам, высокое число допустимых оборотов.
Переменный резистор с одним механическим оборотом (угол поворота до 360°) используется как аналоговый датчик угла поворота. Переменные резисторы используются также в режиме «включено — выключено», при этом одно крайнее положение движка соответствует минимальному значению сопротивления, другое — максимальному.
В контрольной цепи схемы управления электроприводом резистив- ный датчик работает аналогично контакту АП, но без физического разрыва цепи, т. е. разрывом в цепи питания контрольного реле с сопротивлением обмотки, например, ЗкОм, будет являться сопротивление 50к0м и более, а включением будет сопротивление 500 Ом и менее. При максимальном сопротивлении датчика ток в контрольной цепи будет мал и напряжение на контрольном реле будет значительно меньше напряжения гарантированного выключения. При минимальном значении — напряжение на реле будет не менее гарантированного напряжения включения (по тех. паспорту).
Другим элементом возможным для применения в качестве контрольных датчиков АП привода являются дифференциальные трансформаторы (ЬУБТ).
Аббревиатура LVDT образована от словосочетания Linear Variable Differential Transformer — линейный дифференциальный трансформатор с переменным коэффициентом передачи.
LVDT-датчики — электромеханический преобразователь, преобразующий прямолинейное или круговое перемещение объекта, с которым он связан механически, в электрический сигнал. К отличительным особенностям рассматриваемых датчиков можно причислить очень большой динамический диапазон измеряемых перемещений (от десятков микрон до ±0,5 м) и возможность работать в самых жестких условиях эксплуатации. Первое следует из принципа действия, а второе — из конструктивного исполнения.
Из принципа действия и конструкции LVDT-датчика следует ряд очевидных преимуществ:
- отсутствие трущихся частей,
- высокая чувствительность,
- практически неограниченная механическая износостойкость,
- устойчивость к воздействию внешней среды.
- повторяемость (стабильность) нулевой точки.
По принципу описанного датчика работает датчик ДБА в электроприводе СПГБ-4М в ГАД, а также в СП-6МТ, разработанном автором для ЭЦ.
Выводы
- Модернизация АП привода в виде применения новой коммутационной элементной базы неизбежно требует разработки новых схем управления электроприводом.
- Разделение по отдельным линейным проводам цепи управления электродвигателем привода и цепи контроля положения стрелки позволяет постоянно контролировать исправность всех элементов рабочей цепи, а также применить слаботочные бесконтактные датчики в АП привода.
- Из всего многообразия датчиков, в АП необслуживаемого стрелоч¬ного электропривода целесообразно использовать датчики трех типов: трансформатор-ные с подвижным сердечником, магнитоуправляемые герко- новые и резистивные с переменным сопротивлением.
- Разработанный автором АП на базе магнитоуправляемых герметизированных контактов для приводов серии СП может применяться по новой 5 — проводной схеме управления электроприводом при проектировании новых (или реконструируемых) станций, а также в действующих ЭЦ по схеме привязки.
- В схеме управления электроприводами высокоскоростных стрелок с целью экономии кабеля, а также облегчения работы электромеханика при анализе работы схемы и сокращения времени поиска отказа, целесообразно использовать в приводе необслуживаемый коммутатор, который является повторителем рабочих контактов АП и обеспечивает пуск и отключение электродвигателя.
Список литературы
- Резников Ю.М. Структурный синтез бесконтактного стрелочного элек¬тропривода для систем централизации с учетом требований технической диагностики. Сб. трудов ВЗИИТа, вып. 93, — 1978. — С. 32-40.
- Шуваев В.В. Динамика движения остряков в конце перевода стрелки. РГОТУПС РФ. -М., — 2002. 9 е., библиограф. 4 назв., 1 ил., (рукопись депонирована в ВИ-НИТИ 10.10.2002, № 1834 — В2002).
- Указание МПС № Г-304У от 04.04.96. О введении технологии измере¬ний усилий перевода стрелок и кре-стовин. — М.: МПС, — 4 с.
- Талалаев В.И., Сараев В.В., Минаков Е.Ю., Шуваев В.В. Анализ тяговых усилий электропривода с внутрен-ним замыканием шибера. // Автоматика, связь, информа-тика № 2, — 2001. — С. 9-11.
- Талалаев В.И., Сараев В.В., Минаков Е.Ю., Шуваев В.В. Способы установки стрелочных электроприводов ВСП-150 и СП-6. // Автоматика, связь, информатика № 6, — 2001. — С. 18-20.
- Глюзберг Б.Э. Классификация дефектов и поврежде-ний элементов стре¬лочных переводов. — М.: — Транспорт, 1996. 87 с.
- Минаков Е.Ю., Шуваев В.В, Танеев Э.А. Стрелочные электродвигатели переменного тока типа МСА. // В сб. «Транспорт: наука, техника, управле¬ние» № 8, ВИНИ-ТИ. М.\ — 2002, — С. 39-40.
- Повороженко В.В. и др. Эксплуатация железных дорог. — М.: Транспорт, 1982,-С. 79-81.
- Первые итоги внедрения новых методов управления и эксплуатации. // Железные дороги мира — 2000. — №7. — С. 8 (D; Briginshow., International Railway Journal, 2000, №3, p. 11-21).
- Динамические испытания стрелочных электроприво-да СП-3 и его гар¬нитуры в условиях движения поездов со скоростью 200 км/ч. ЛИИЖТ, НИР, 1976г.
- Исследование влияния взреза на элементы электропри-вода СП-6 и стре¬лочной гарнитуры ДИИЖТ, НИР, 1983г.
- Динамические прочностные и эксплуатационные испы-тания опытной партии гарнитур для крестовин с НПК. ПГУПС, НИР, 1992г.
- Определение динамических воздействий в условиях ре-альной эксплуа¬тации при различных скоростях подвиж-ного состава и нагрузках на ось. ПГУПС, НИР, 1996г.
- В.А.Злобин и др. Ферритовые материалы. Л.: Энергия, 1970 — 112 с.
- В.В.Пасынков, В.С.Сорокин. Материалы электронной техники, М.: Высшая школа, 1986 — 367 с.
- Ю.В. Корицкий и др. Справочник по электротехниче-ским материалам. Т.З, Л.: Энергоатомиздат, 1988 — 728 с
- Разработка нового стрелочного электропривода. ПГУПС, НИР, 2009г.
- Железнодорожная автоматика и телемеханика. Термины и определения. ГОСТ Р 53431-2009.
- Электонная энциклопедия http://www.krugosvet.ru.
- Электронный каталог измерительных приборов http://www.datchik.ru
- Сайт «Электронные компоненты» http://www.elcp.ru/
- Большая Советская Энциклопедия http://referatu.ru/
- ОАО «Рязанский завод металлокерамических приборов» http://www.rmcip.ru